
Следующий формфактор NEMA 23 представлен такими моделями
| Модель | ||||||||||||
| 57HS4128A4 | 1,8 | 41 | 6,35 | 21 | 2,8 | 0,7 | 1,4 | 0,55 | 2,5 | 150 | 4 | 0,55 |
| 57HS5128A4 | 1,8 | 51 | 6,35 | 21 | 2,8 | 0,83 | 2,2 | 1,1 | 2,8 | 190 | 4 | 0,6 |
| 57HS5128B4 | 1,8 | 51 | 6,35 | 21 | 2,8 | 0,83 | 2,2 | 1,1 | 2,8 | 190 | 4 | 0,65 |
| 57HS5630A4 | 1,8 | 56 | 6,35 | 21 | 3 | 0,9 | 2,4 | 1,2 | 3,5 | 280 | 4 | 0,72 |
| 57HS5630A4D8 | 1,8 | 56 | 8 | 21 | 3 | 0,9 | 2,4 | 1,2 | 3,5 | 280 | 4 | 0,72 |
| 57HS5630B4 | 1,8 | 56 | 6,35 | 21 | 3 | 0,9 | 2,4 | 1,2 | 3,5 | 280 | 4 | 0,72 |
| 57HS5630B4D8 | 1,8 | 56 | 8 | 21 | 3 | 0,9 | 2,4 | 1,2 | 3,5 | 280 | 4 | 0,72 |
| 57HS7630A4 | 1,8 | 76 | 6,35 | 21 | 3 | 1,1 | 3,6 | 1,89 | 6 | 440 | 4 | 1,2 |
| 57HS7630A4D8 | 1,8 | 76 | 8 | 21 | 3 | 1,1 | 3,6 | 1,89 | 6 | 440 | 4 | 1,2 |
| 57HS7630B4 | 1,8 | 76 | 6,35 | 21 | 3 | 1,1 | 3,6 | 1,89 | 6 | 440 | 4 | 1,2 |
| 57HS7630B4D8 | 1,8 | 76 | 8 | 21 | 3 | 1,1 | 3,6 | 1,89 | 6 | 440 | 4 | 1,2 |
| 57HS8430A4 | 1,8 | 84 | 6,35 | 21 | 3 | 1,2 | 4 | 2,2 | 6 | 620 | 4 | 1,4 |
| 57HS8430A4D8 | 1,8 | 84 | 8 | 21 | 3 | 1,2 | 4 | 2,2 | 6 | 620 | 4 | 1,4 |
| 57HS8430B4 | 1,8 | 84 | 6,35 | 21 | 3 | 1,2 | 4 | 2,2 | 6 | 620 | 4 | 1,4 |
| 1,8 | 84 | 8 | 21 | 3 | 1,2 | 4 | 2,2 | 6 | 620 | 4 | 1,4 | |
| 1,8 | 112 | 8 | 21 | 3 | 1,6 | 6,8 | 3 | 12 | 800 | 4 | 1,8 | |
| 1,8 | 112 | 8 | 21 | 3 | 1,6 | 6,8 | 3 | 12 | 800 | 4 | 1,8 | |
| 1,8 | 112 | 8 | 21 | 4,2 | 1,4 | 1,8 | 3 | 12 | 800 | 4 | 1,8 |
У NEMA 23 диаметр вала составляет 6,35 мм или 8 мм
Что такое шаговый двигатель Nema17?
Шаговый двигатель Nema17 — это тип исполнительного устройства, который используется для преобразования электрической энергии в механическую работу. Он получил свое название от стандарта NEMA (National Electrical Manufacturers Association), который определяет размеры и характеристики данного типа шагового двигателя.
Шаговые двигатели Nema17 отличаются от других типов двигателей тем, что они работают по принципу последовательного перемещения ротора, то есть по шагам. Каждый шаг соответствует фиксированному углу поворота ротора, который зависит от конструкции двигателя и используемого драйвера. Чтобы повернуть ротор на определенный угол, необходимо отправить соответствующий сигнал на драйвер шагового двигателя.
Шаговые двигатели Nema17 широко применяются в различных устройствах, таких как принтеры, сканеры, роботы, 3D-принтеры, аппараты для автоматизации производства и другие устройства, где требуется точное позиционирование и контроль движения.
Основные характеристики шагового двигателя Nema17:
- Размер: стандартные размеры корпуса двигателя Nema17 составляют 42 x 42 мм (1.7 x 1.7 дюйма).
- Количество шагов: шаговый двигатель Nema17 обычно имеет 200 шагов на оборот, что означает, что для поворота вала на 360 градусов необходимо сделать 200 шагов.
- Момент удержания: шаговый двигатель Nema17 может обеспечивать достаточно высокий момент удержания, что позволяет ему удерживать нагрузку без использования дополнительных механизмов.
- Напряжение питания: обычно шаговые двигатели Nema17 работают от напряжения в диапазоне 12-24 В.
Для управления шаговым двигателем Nema17 необходимо использовать специальное устройство — драйвер шагового двигателя. Драйвер обеспечивает поочередное подачу сигналов на обмотки двигателя для выполнения шагового поворота. При выборе драйвера необходимо учитывать требования по напряжению, току и максимальной поддерживаемой частоте вращения двигателя.
Шаговые двигатели Nema17 отличаются высокой точностью позиционирования, простой конструкцией и надежностью. Они широко используются в инженерии и робототехнике, благодаря своим уникальным характеристикам и возможностям контроля и управления движением.
NEMA 17 stepper motor
NEMA 17 is a hybrid stepper motor that rotates with a step angle of 1.8 degrees. Thus to complete one revolution, the shaft takes 200 steps. The term hybrid signifies that it is a combination of a permanent magnet and variable reluctance stepper motor.
With dimensions, of 1.7 x 1.7 inches (42 x 42 mm), NEMA 17 steppers are engineered to provide more torque than smaller variants like NEMA 14 stepper motor.
NEMA 17 Stepper Motor
Like every other motor, the NEMA 17 stepper motor consists of a stator and rotor. The rotor of the NEMA 17 motor is a permanent magnet with 50 teeth on its circumference. The stator is simply an electromagnet with 48 teeth.
These are arranged into four group pairs, where each group can be controlled by DC excitation. So, when we excite the stator coil pairs using a microcontroller, the rotor rotates with a smooth step angle.
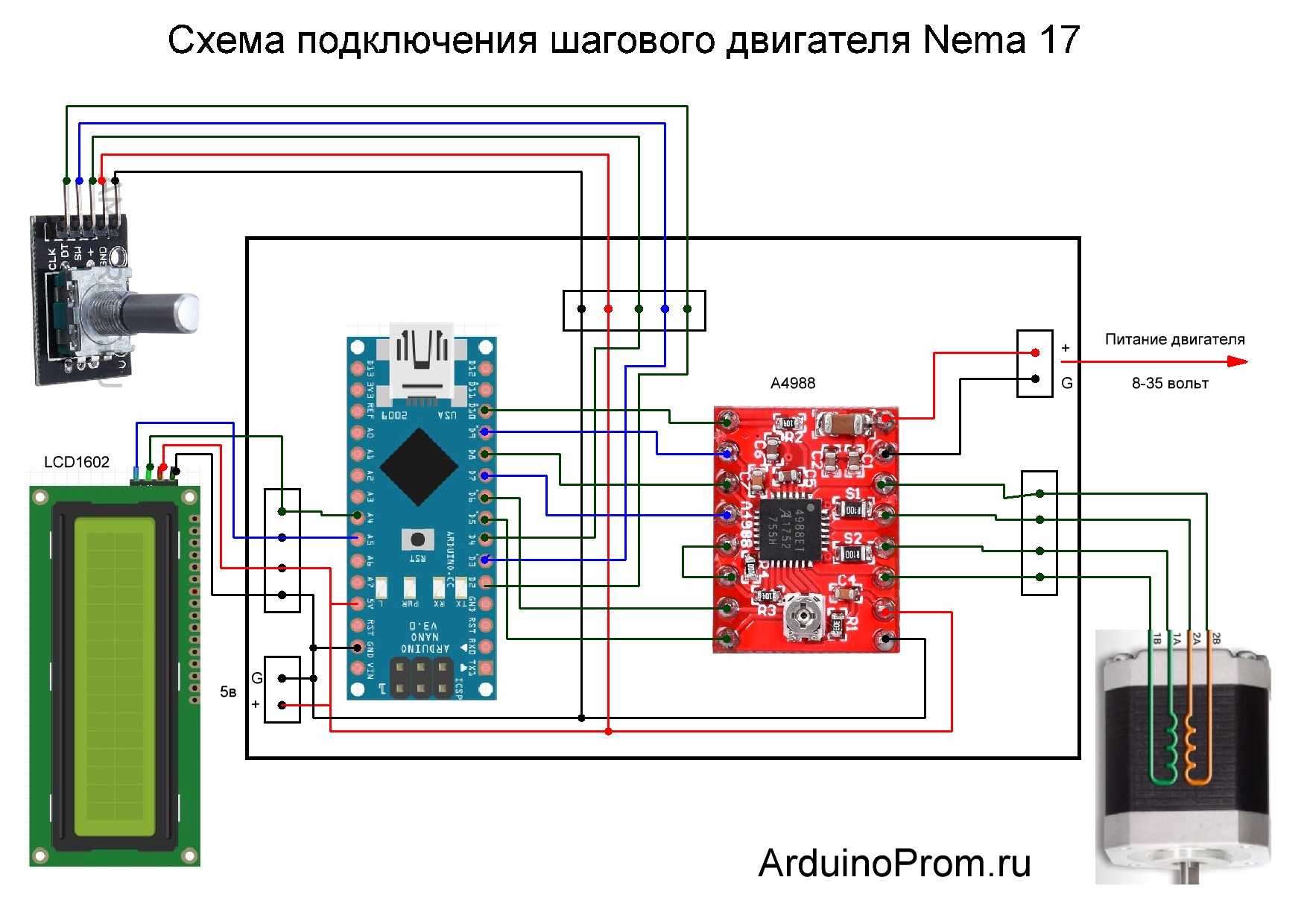
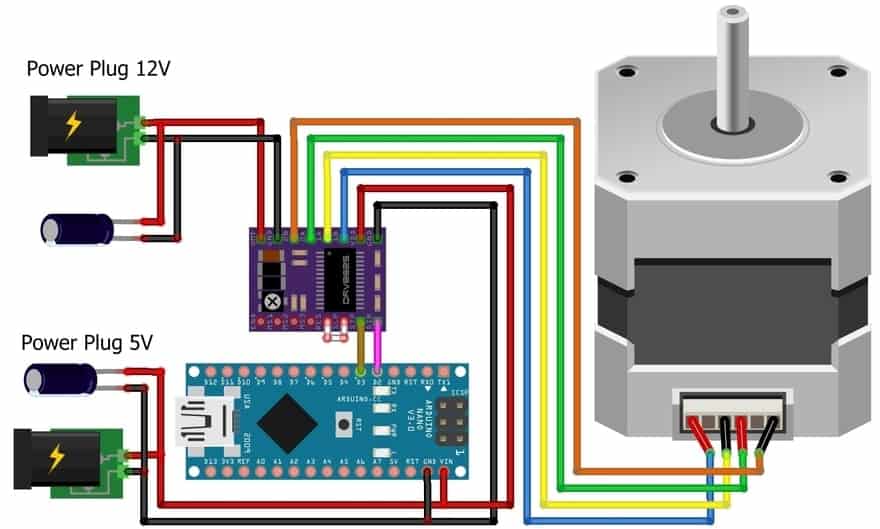
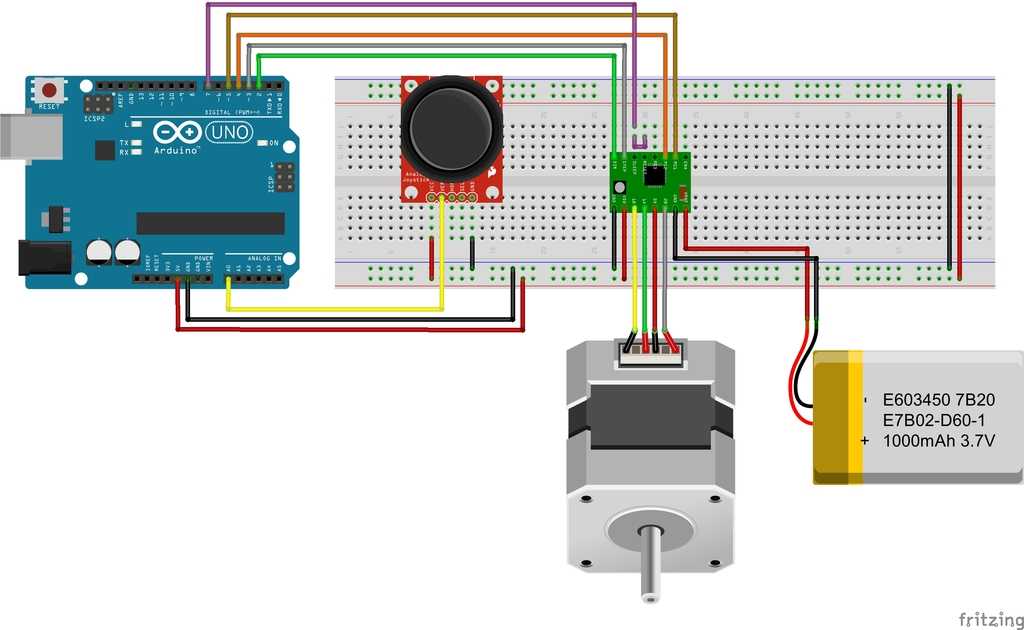
Пример того, как начать работу с Nema 17 и Arduino
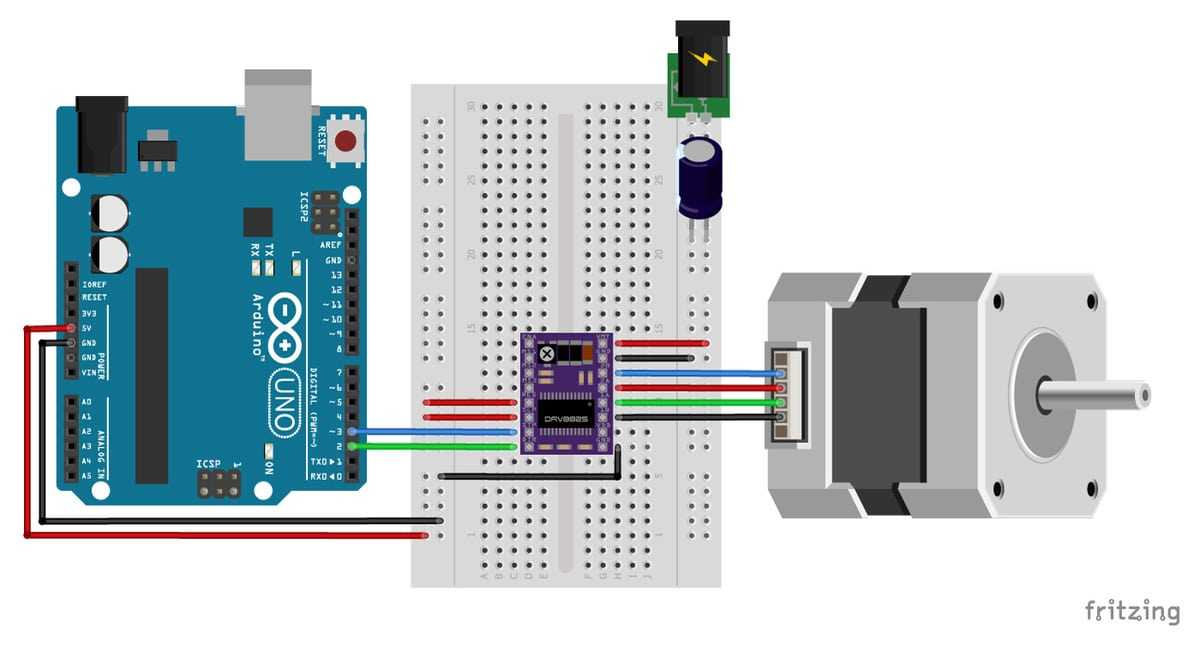
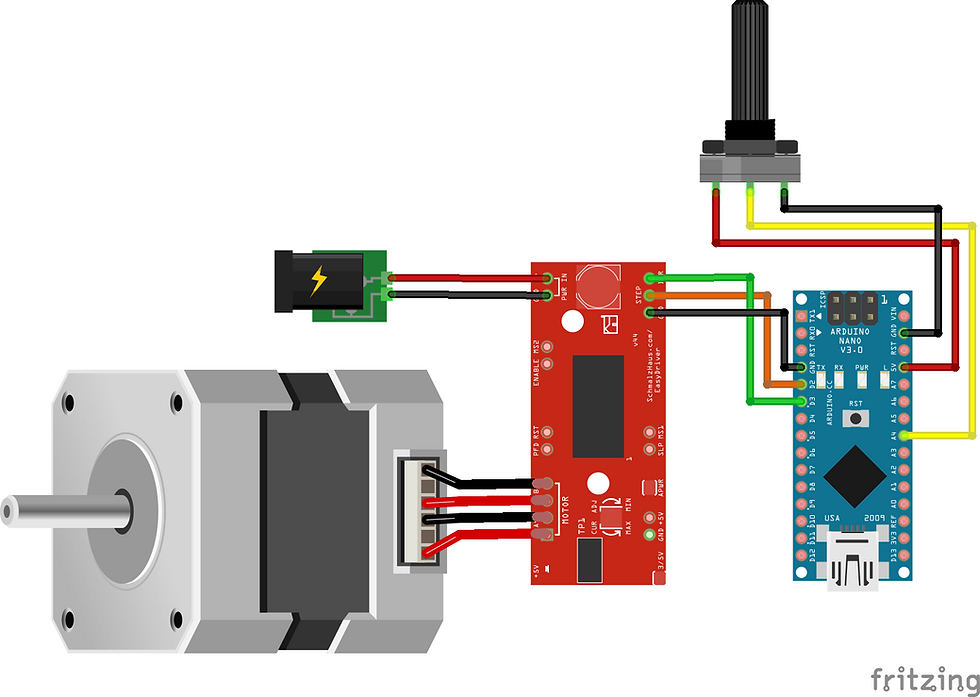
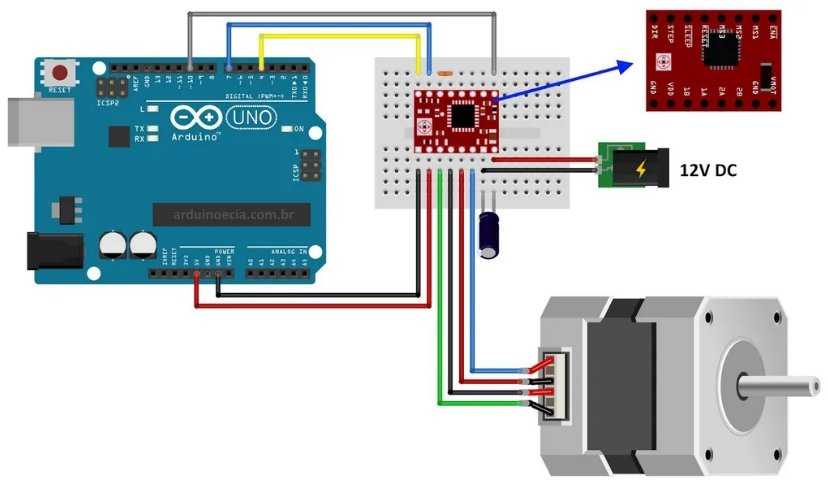
Простой пример, чтобы начать использовать это шаговый двигатель NEMA 17 С Arduino вы можете собрать эту простую схему. Я использовал драйвер для двигателей DRV8825, но вы можете использовать другой и даже другой шаговый двигатель, если хотите изменить проект и адаптировать его к своим потребностям. То же самое происходит с кодом скетча, который вы можете изменить по своему усмотрению …
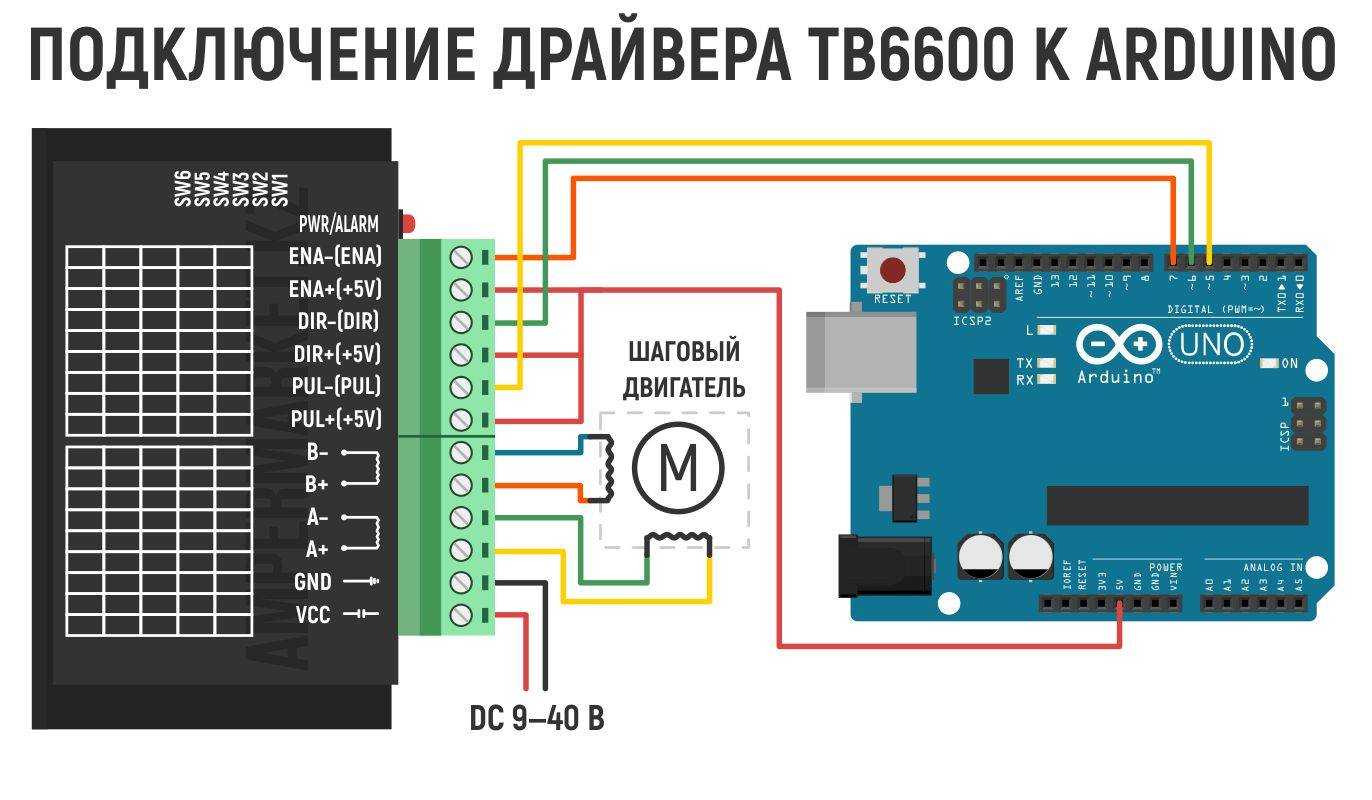
В случае используемого драйвера он выдерживает напряжение 45 В и 2 А, поэтому идеально подходит для шаговых двигателей или шаговых двигателей малого и среднего размера, таких как биполярный NEMA 17. Но если вам нужно что-то «тяжелее», мотор побольше, например NEMA 23, то вы можете использовать драйвер TB6600.
Помните, что вы также можете использовать библиотеку Accelstepper для лучшей управляемости. Библиотека, написанная Майком Макколи, очень практичная для ваших проектов, с поддержкой ускорения и замедления, что является большим преимуществом для множества функций.
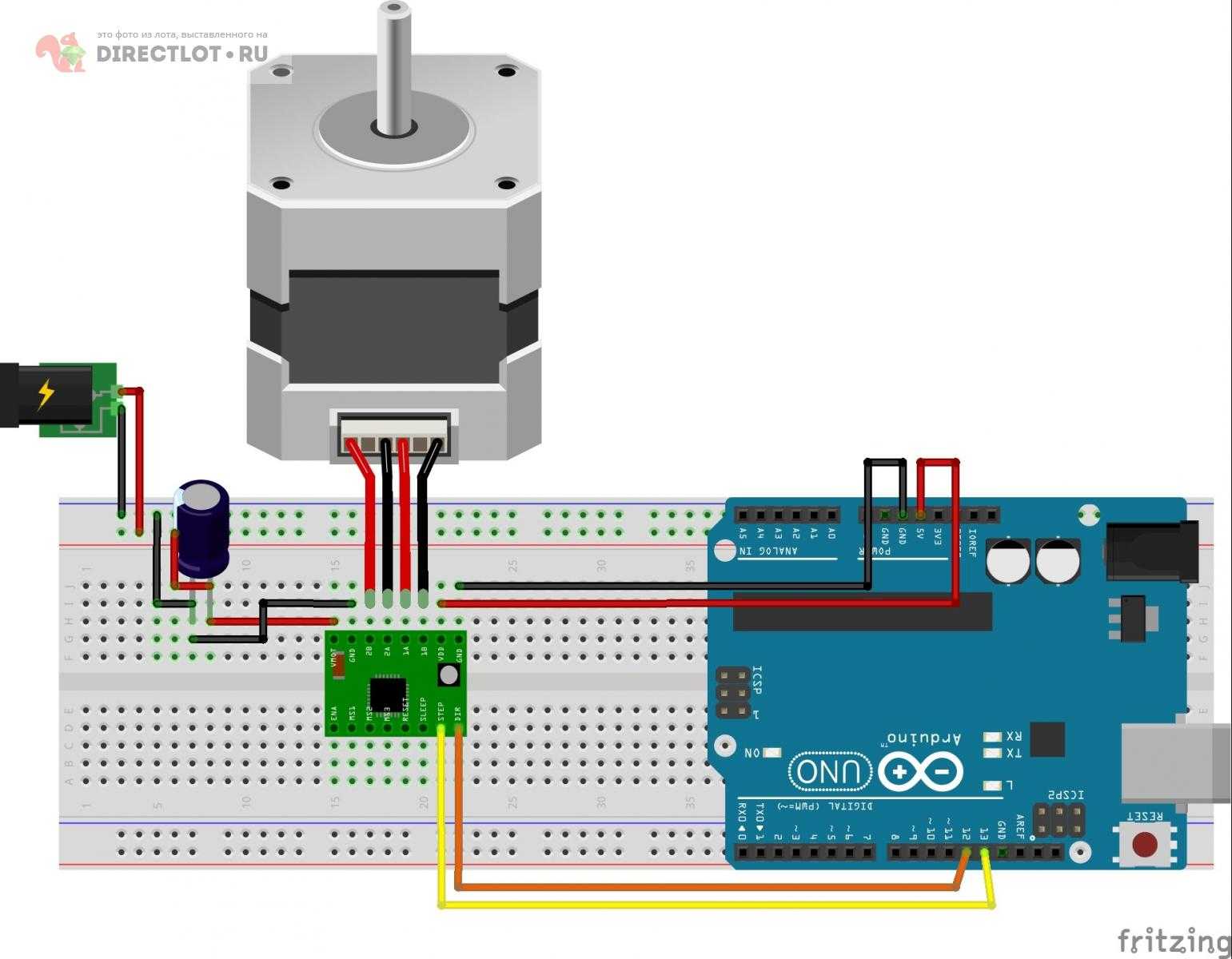
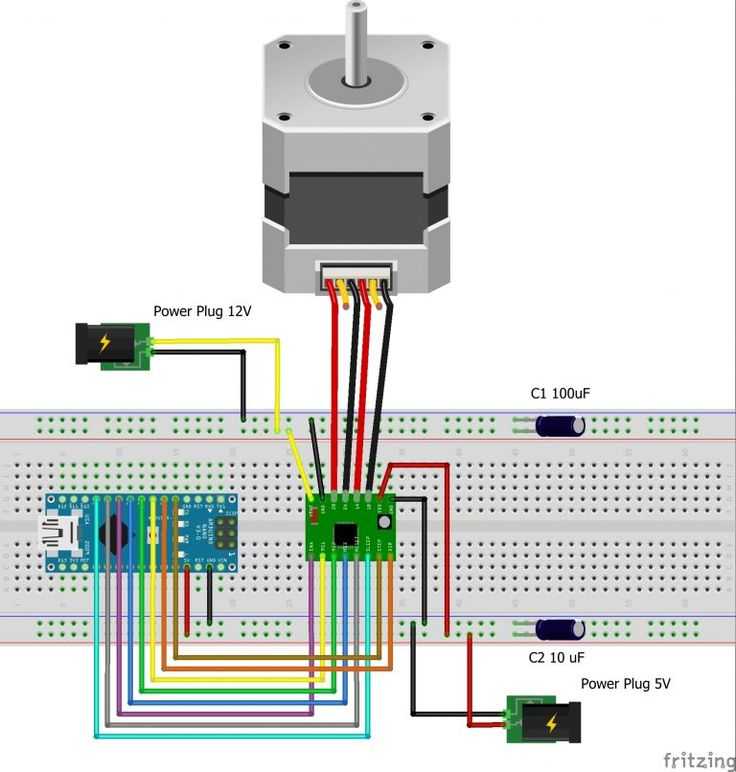
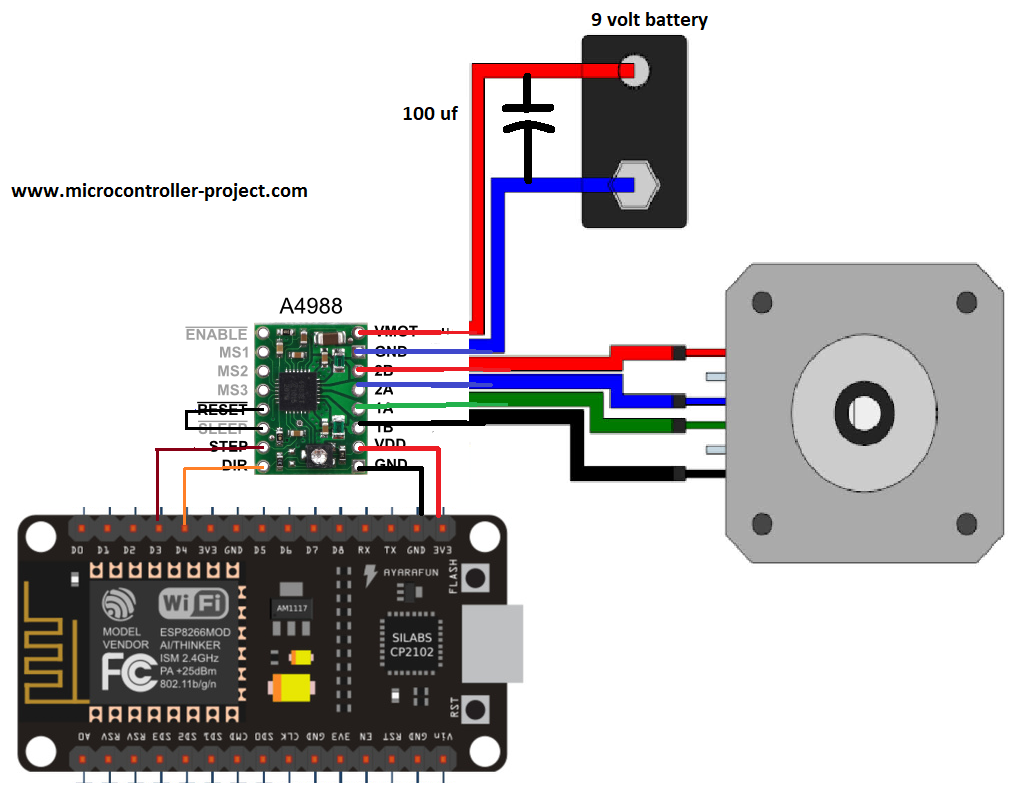
Лас- связи суммированы следующие:
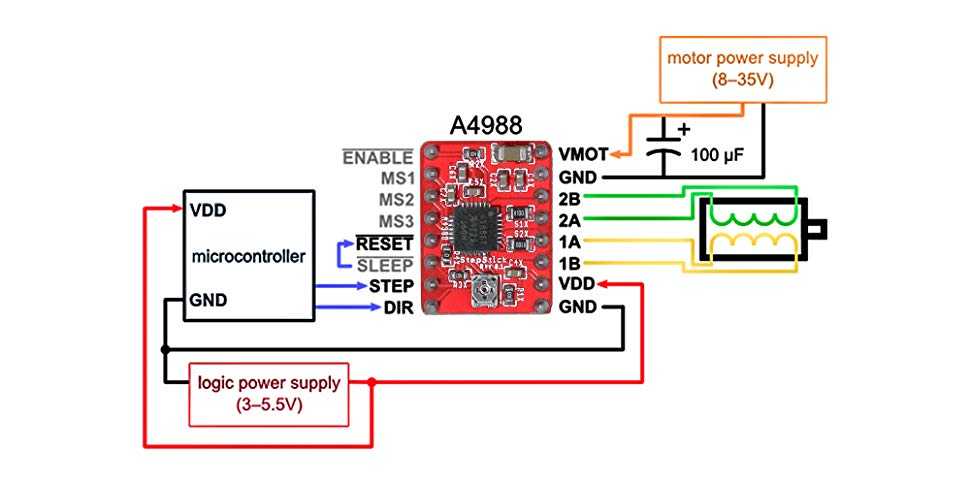
- Двигатель NEMA 17 имеет соединения GND и VMOT с источником питания. Который на изображении появляется с компонентом с нарисованным лучом и конденсатором. Источник должен иметь напряжение от 8 до 45 В, а добавленный конденсатор, который я добавил, может быть 100 мкФ.
- Две катушки шагового двигателя подключены к A1, A2 и B1, B2 соответственно.
- Вывод GND дайвера подключен к GND Arduino.
- Вывод VDD драйвера подключен к 5 В Arduino.
- STP и DIR для шага и направления подключены к цифровым контактам 3 и 2 соответственно. Если вы хотите выбрать другие выводы Arduino, вам просто нужно соответствующим образом изменить код.
- RST и SLP для сброса и сна драйвера должны быть подключены к 5v платы Arduino.
- EN или активационный контакт могут быть отключены, так как в этом случае драйвер будет активен. Если он установлен на HIGH вместо LOW, драйвер отключен.
- Остальные контакты будут отключены …
Относительно код эскизаЭто может быть так просто, чтобы заставить NEMA 17 работать и приступить к работе, каламбур …
#define dirPin 2
#define stepPin 3
#define stepsPerRevolution 200
void setup() {
// Declare pins as output:
pinMode(stepPin, OUTPUT);
pinMode(dirPin, OUTPUT);
}
void loop() {
// Set the spinning direction clockwise:
digitalWrite(dirPin, HIGH);
// Spin the stepper motor 1 revolution slowly:
for (int i = 0; i < stepsPerRevolution; i++) {
// These four lines result in 1 step:
digitalWrite(stepPin, HIGH);
delayMicroseconds(2000);
digitalWrite(stepPin, LOW);
delayMicroseconds(2000);
}
delay(1000);
// Set the spinning direction counterclockwise:
digitalWrite(dirPin, LOW);
// Spin the stepper motor 1 revolution quickly:
for (int i = 0; i < stepsPerRevolution; i++) {
// These four lines result in 1 step:
digitalWrite(stepPin, HIGH);
delayMicroseconds(1000);
digitalWrite(stepPin, LOW);
delayMicroseconds(1000);
}
delay(1000);
// Set the spinning direction clockwise:
digitalWrite(dirPin, HIGH);
// Spin the stepper motor 5 revolutions fast:
for (int i = 0; i < 5 * stepsPerRevolution; i++) {
// These four lines result in 1 step:
digitalWrite(stepPin, HIGH);
delayMicroseconds(500);
digitalWrite(stepPin, LOW);
delayMicroseconds(500);
}
delay(1000);
// Set the spinning direction counterclockwise:
digitalWrite(dirPin, LOW);
//Spin the stepper motor 5 revolutions fast:
for (int i = 0; i < 5 * stepsPerRevolution; i++) {
// These four lines result in 1 step:
digitalWrite(stepPin, HIGH);
delayMicroseconds(500);
digitalWrite(stepPin, LOW);
delayMicroseconds(500);
}
delay(1000);
}
Больше информации, вы можете проконсультироваться с курсом программирования с Arduino IDE пользователя Hwlibre.
Объяснение программы для Arduino
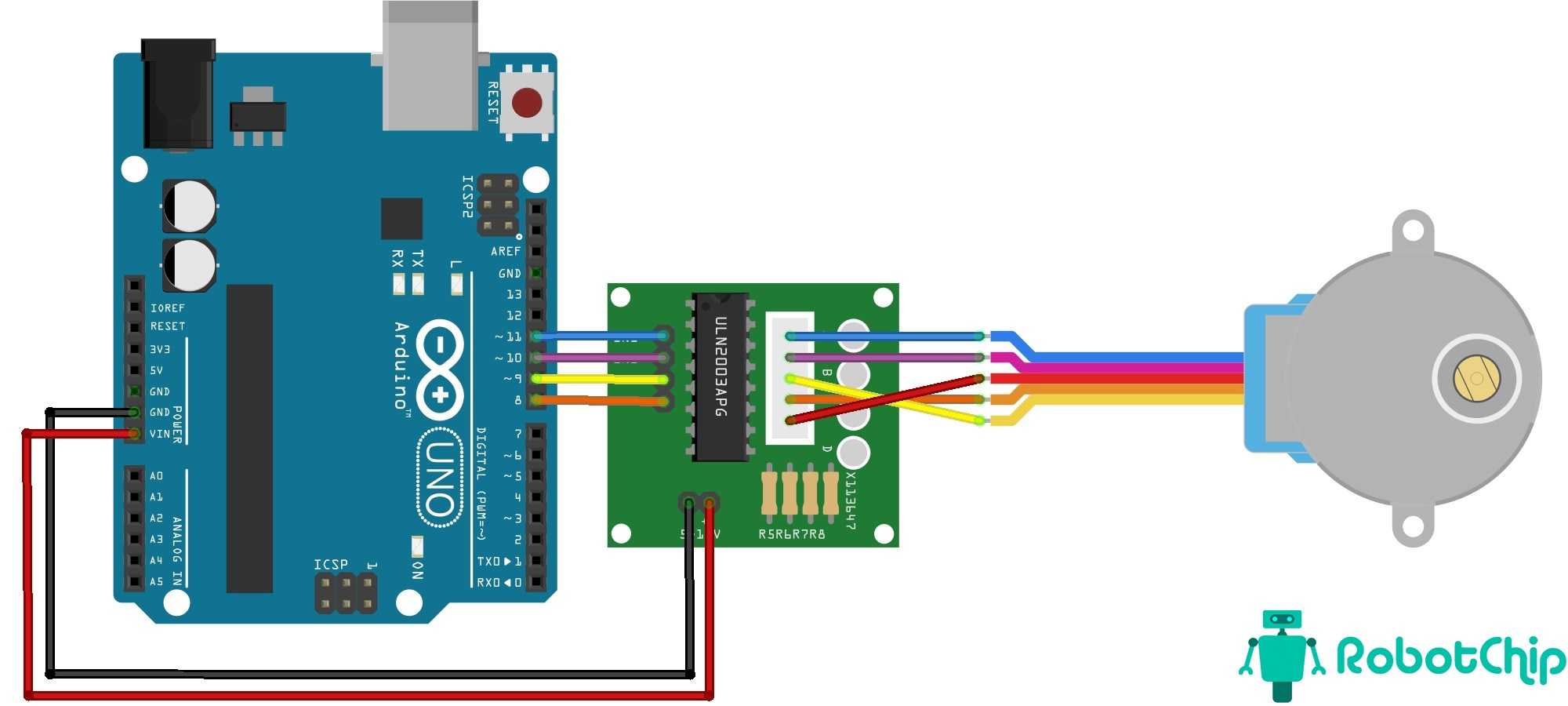
Полный код программы и видео с демонстрацией работы схемы приведены в конце статьи, здесь же мы кратко рассмотрим основные фрагменты кода.
Первым делом скачайте библиотеку для управления шаговым двигателем по следующей ссылке и добавьте ее в Arduino IDE. После этого подключите заголовочный файл этой библиотеки в программе и укажите число шагов для шагового двигателя NEMA 17 – оно равно 200.
Arduino
#include <Stepper.h>
#define STEPS 200
|
1 |
#include <Stepper.h> #define STEPS 200 |
После этого укажем в программе контакты Arduino, к которым подключен модуль драйвера двигателя и определим тип интерфейса для двигателя как Type1 поскольку шаговый двигатель подключен к плате Arduino с помощью модуля драйвера двигателя.
Arduino
Stepper stepper(STEPS, 2, 3);
#define motorInterfaceType 1
|
1 |
Stepperstepper(STEPS,2,3); #define motorInterfaceType 1 |
Далее установим скорость для шагового двигателя с помощью функции stepper.setSpeed. Максимальная скорость двигателя NEMA 17 составляет 4688 RPM (число оборотов в минуту), но если его крутить со скоростью более 1000 RPM, то у него значительно падает крутящий момент.
Arduino
void setup() {
stepper.setSpeed(1000);
|
1 |
voidsetup(){ stepper.setSpeed(1000); |
После этого, в основной функции loop мы будем считывать значения с потенциометра, подключенного к контакту A0. В этой функции мы будем использовать две переменные – potVal и Pval. Если текущее значение (potVal) больше его предыдущего значения (Pval), то мы будем вращать шаговый двигатель на 10 шагов по часовой стрелке, а если меньше — то мы будем вращать шаговый двигатель на 10 шагов против часовой стрелки.
Arduino
potVal = map(analogRead(A0),0,1024,0,500);
if (potVal>Pval)
stepper.step(10);
if (potVal<Pval)
stepper.step(-10);
Pval = potVal;
|
1 |
potVal=map(analogRead(A0),,1024,,500); if(potVal>Pval) stepper.step(10); if(potVal<Pval) stepper.step(-10); Pval=potVal; |
После сборки аппаратной части проекта и загрузки кода программы в плату Arduino вы сможете управлять направлением вращения шагового двигателя Nema17 с помощью потенциометра. Более подробно этот процесс вы можете посмотреть на видео, приведенном в конце статьи.







Applications:
3D printer:
A stepper motor is almost present in lists of common 3D printer parts. This is because a stepper motor is a highly accurate and economical means to make extremely exact rotations and actions while a 3D printer is attempting to convert data from digital scans into actual 3D objects.
Computer Numerical Control (CNC):
The majority of CNC machinery can be powered by stepper motors instead of servo motors. Numerous manufacturing processes use CNC applications, in which machine tools are operated and moved physically by pre-programed computer software in manufacturing and fabrication environments.
Cameras:
For use in camera and video surveillance positioning systems, stepper motors also offer several other desirable characteristics, such as full torque at a standstill, extremely quick and accurate response times for all movement inputs, consistent repeatability of predetermined movements, and simple open-loop controls defined by fixed step sizes.
Осциллограммы фазного тока
Различные режимы привода, показывающие ток катушки на 4-фазном униполярном шаговом двигателе.
Шаговый двигатель — это многофазный (см. Теорию ниже), который в идеале приводится в действие синусоидальным током. Форма волны полного шага является грубым приближением к синусоиде и является причиной того, что двигатель так сильно вибрирует. Для лучшего приближения синусоидальной формы волны возбуждения были разработаны различные методы возбуждения: это полушаговый и микрошаговый.
Волновой привод (одна фаза включена)
В этом методе привода одновременно активируется только одна фаза. У него такое же количество ступеней, что и у полношагового привода, но двигатель будет иметь значительно меньший крутящий момент, чем номинальный. Используется редко. На анимированном рисунке, показанном выше, изображен волновой приводной двигатель. На анимации у ротора 25 зубцов, и требуется 4 шага, чтобы повернуться на одно положение зуба. Таким образом, на полный оборот будет 25 × 4 = 100 шагов, и каждый шаг будет составлять 360/100 = 3,6 градуса.
Полноступенчатый привод (включены две фазы)
Это обычный метод для полного шага двигателя. Две фазы всегда включены, поэтому двигатель обеспечивает максимальный номинальный крутящий момент. Как только одна фаза отключается, включается другая. Волновой привод и однофазный полный шаг — это одно и то же, с одинаковым количеством шагов, но с разницей в крутящем моменте.
Полушаг
В полушаговом режиме привод попеременно включается между двумя фазами и одной фазой. Это увеличивает угловое разрешение. Двигатель также имеет меньший крутящий момент (примерно 70%) в положении полного шага (когда включена только одна фаза). Это можно уменьшить, увеличив ток в активной обмотке для компенсации. Преимущество полушагового режима состоит в том, что электроника привода не требует изменений, чтобы поддерживать его. На анимированном рисунке, показанном выше, если мы изменим его на полушаг, тогда потребуется 8 шагов, чтобы повернуть на 1 позицию зубца. Таким образом, будет 25 × 8 = 200 шагов на полный оборот, и каждый шаг будет 360/200 = 1,8 °. Его угол на шаг составляет половину полного шага.
Микрошаг
То, что обычно называют микрошагом, часто является синусо-косинусным микрошагом, при котором ток обмотки приближается к синусоидальной форме волны переменного тока. Обычный способ получения синусо-косинусного тока — это схемы с чоппером. Синусо-косинусный микрошаг является наиболее распространенной формой, но могут использоваться и другие формы сигналов. Независимо от используемой формы волны, когда микрошаги становятся меньше, работа двигателя становится более плавной, что значительно снижает резонанс в любых частях, к которым двигатель может быть подключен, а также в самом двигателе. Разрешение будет ограничено механическим заеданием , люфтом и другими источниками ошибок между двигателем и конечным устройством. Редукторы можно использовать для увеличения разрешения позиционирования.
Уменьшение размера шага — важная особенность шаговых двигателей и основная причина их использования при позиционировании.
Пример: многие современные гибридные шаговые двигатели рассчитаны таким образом, что ход каждого полного шага (например, 1,8 градуса за полный шаг или 200 полных шагов за оборот) будет в пределах 3% или 5% хода каждого второго полного шага, пока поскольку двигатель работает в заданных рабочих диапазонах. Некоторые производители показывают, что их двигатели могут легко поддерживать 3% или 5% равенство размера шага, поскольку размер шага уменьшается с полного шага до 1/10 шага. Затем, когда число делителя микрошага увеличивается, повторяемость размера шага ухудшается. При большом уменьшении размера шага можно подать множество команд микрошага до того, как вообще произойдет какое-либо движение, и тогда движение может быть «прыжком» в новую позицию. Некоторые ИС шагового контроллера используют увеличенный ток, чтобы минимизировать такие пропущенные шаги, особенно когда импульсы пикового тока в одной фазе в противном случае были бы очень короткими.
Подключение униполярного шагового двигателя NEMA 23 57HM56-2006 к RAMPS 1.4
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых постах.
Отписаться от уведомлений вы всегда сможете в профиле автора.
Статья относится к принтерам:
Добрый день 3д печатники и ‘колхозники’.
Подключение униполярного шагового двигателя NEMA 23 57HM56-2006 к RAMPS 1.4.
Шаговый униполярный двигатель NEMA 23 57HM56-2006 имеет шесть проводов, и что бы подключить его к Ramp 1.4 или любой другой плате нам потребуется переделать его из униполярного в биполярный.

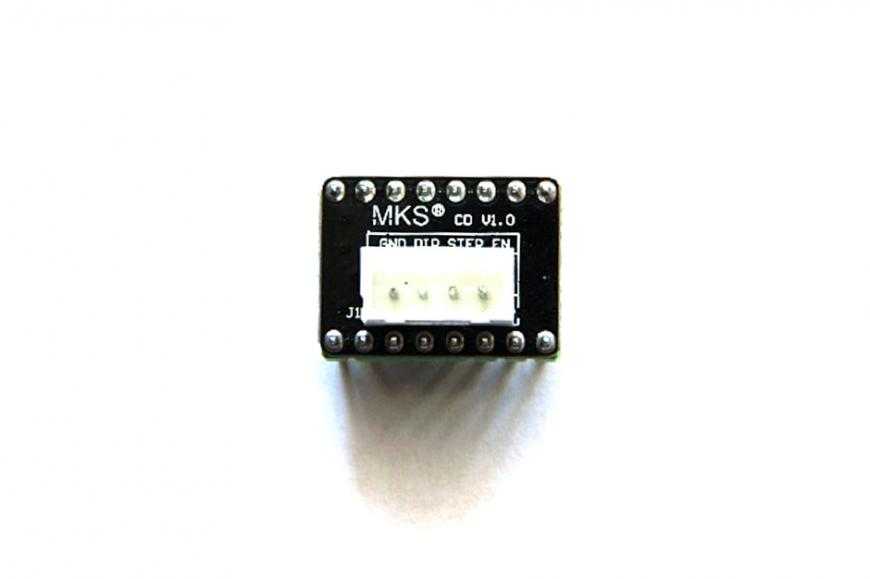
Шаговый униполярный двигатель NEMA 23 57HM56-2006 имеет ток 2 А, поэтому обычный драйвер шагового двигателя A4998 нам не подойдёт. Я буду использовать драйвер ШД TB6600 и плату MKS CD 57/86, что бы подключить его к ramps.
Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовываться драйвером. Для такого типа двигателя требуется мостовой драйвер, или полумостовой с двухполярным питанием. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода.
Униполярный двигатель также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При этом существенно упрощается схема драйвера. Драйвер должен иметь только 4 простых ключа. Таким образом, в униполярном двигателе используется другой способ изменения направления магнитного поля. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов. Иногда униполярные двигатели имеют раздельные 4 обмотки, по этой причине их ошибочно называют 4-х фазными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8. При соответствующем соединении обмоток такой двигатель можно использовать как униполярный или как биполярный. Униполярный двигатель с двумя обмотками и отводами тоже можно использовать в биполярном режиме, если отводы оставить неподключенными.
Если сравнивать между собой биполярный и униполярный двигатели, то биполярный имеет более высокую удельную мощность. При одних и тех же размерах биполярные двигатели обеспечивают больший момент.
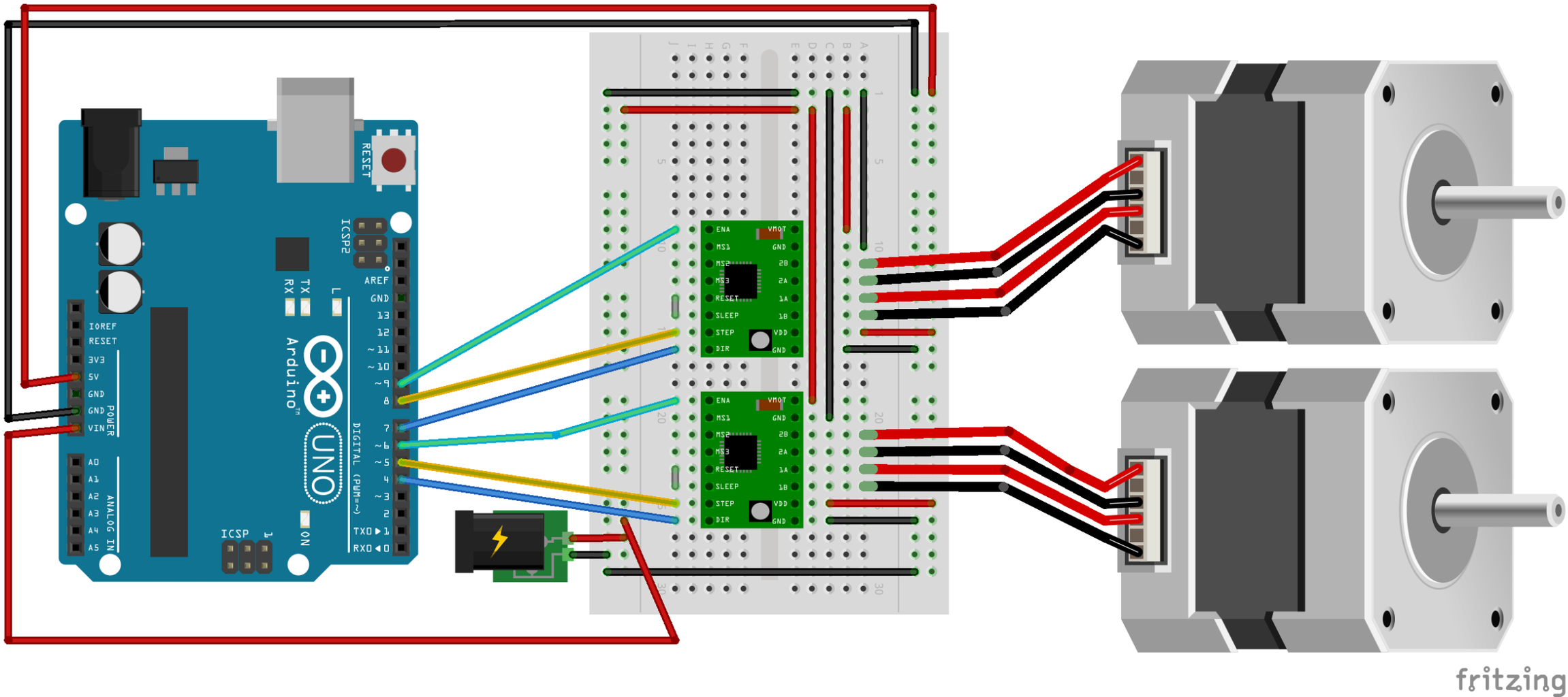
На схеме ниже показаны два двигателя. Слева униполярный, 6 выводов. Справа биполярный, 4 вывода.

Аналогичная схема ниже, но у же с буквенным обозначением выводов.
Слева биполярный, справа униполярный двигатель.
Исходя из схем выше, возможно два варианта переделки униполярного двигателя в биполярный двигатель.
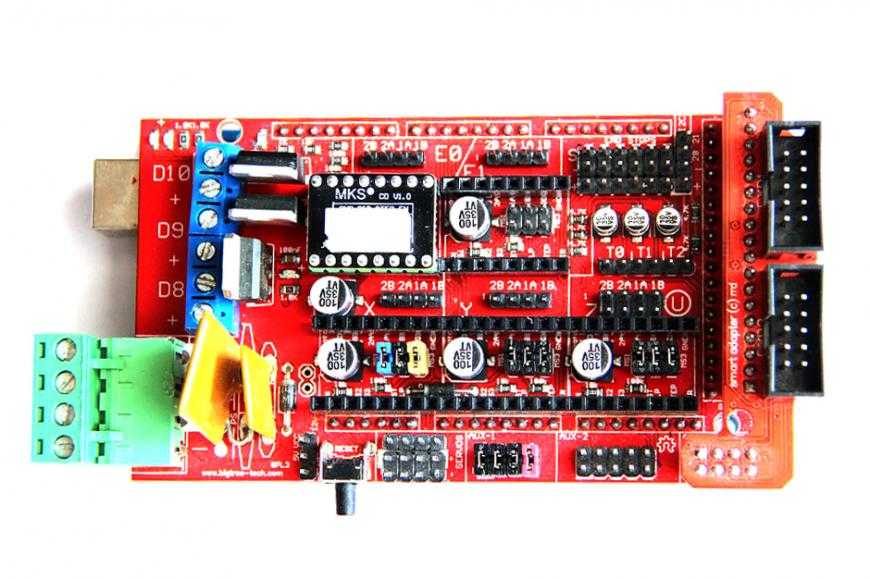
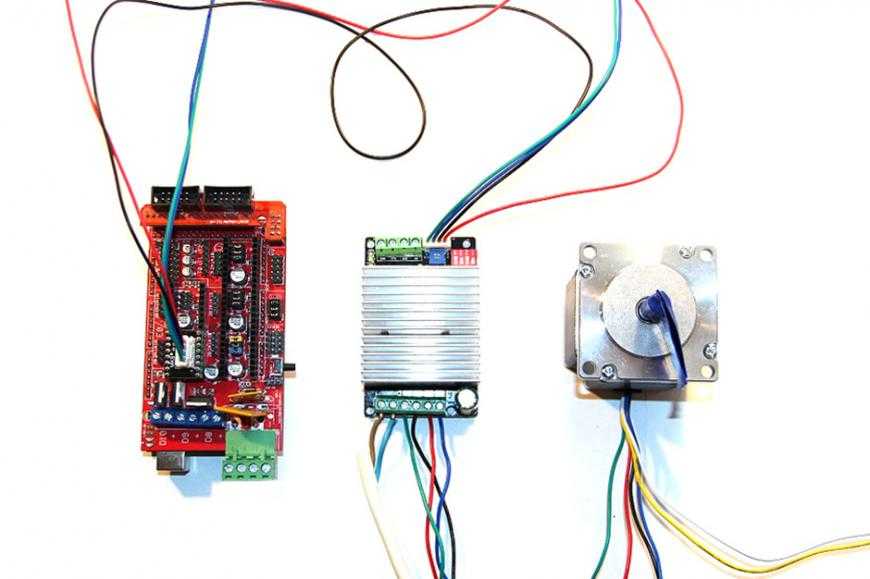
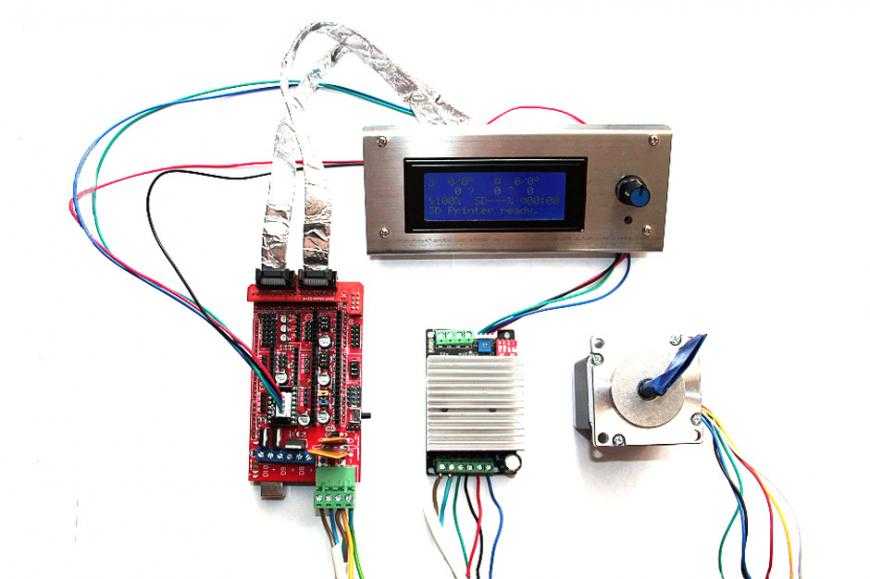
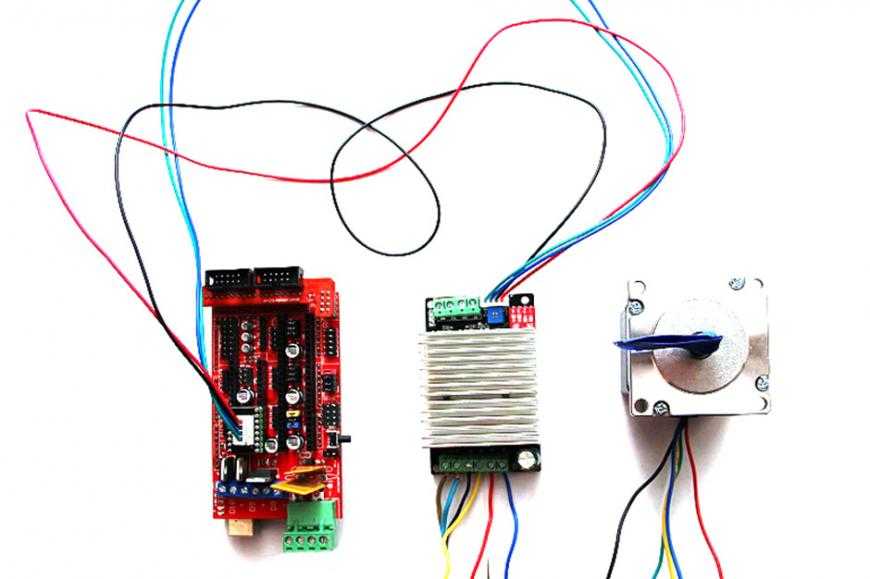
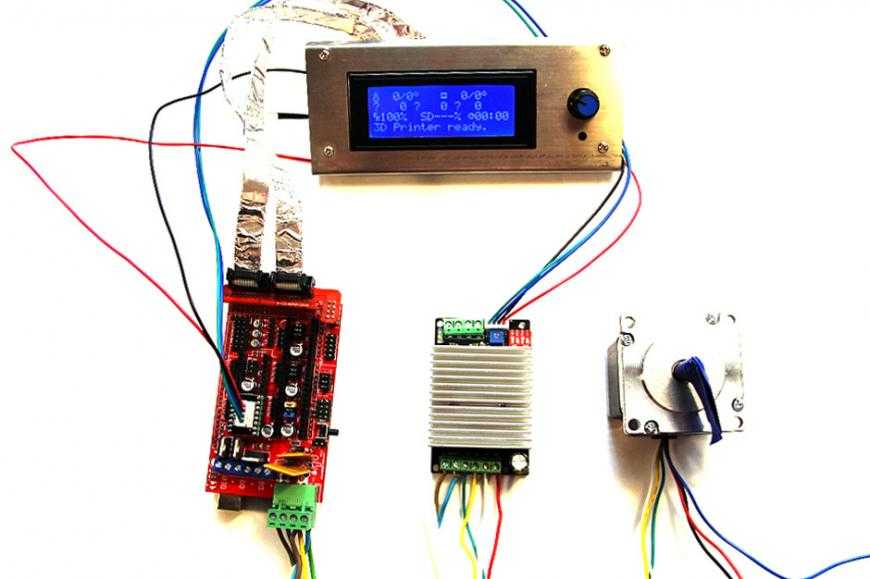
Я соберу тестовый стенд для наглядности, который включает в себя: ramps 1.4, arduino mega 2560, драйвер шагового двигателя TB6600, плата MKS CD 57/86 для внешнего драйвера ШД TB6600, LCD Display 2004, шаговый двигатель NEMA 23 57HM56-2006.
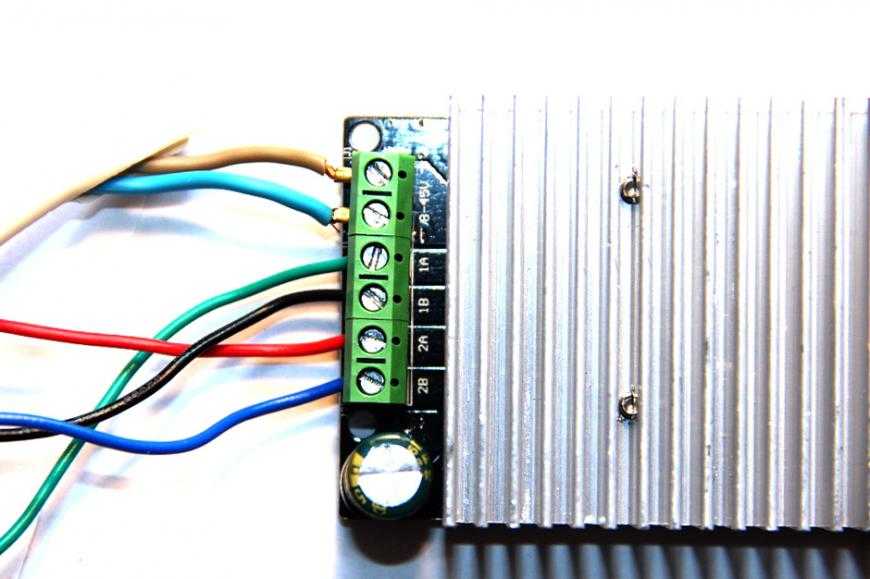
1) Первый вариант. Подключаем двигатель к драйверу не используя центральные выводы в обмотках, то есть желтый и белый. Таким способом подключения мы получим высокий момент.



Пошаговая инструкция для чайников :).
1) Устанавливаем плату MKS CD 57/86 в штатный разъем ramps 1.4 для шагового драйвера, соблюдая полярность.
Пошаговая инструкция уже для опытных мейкеров 8).
1) Устанавливаем плату MKS CD 57/86 в штатный разъем ramps 1.4 для шагового драйвера, соблюдая полярность.
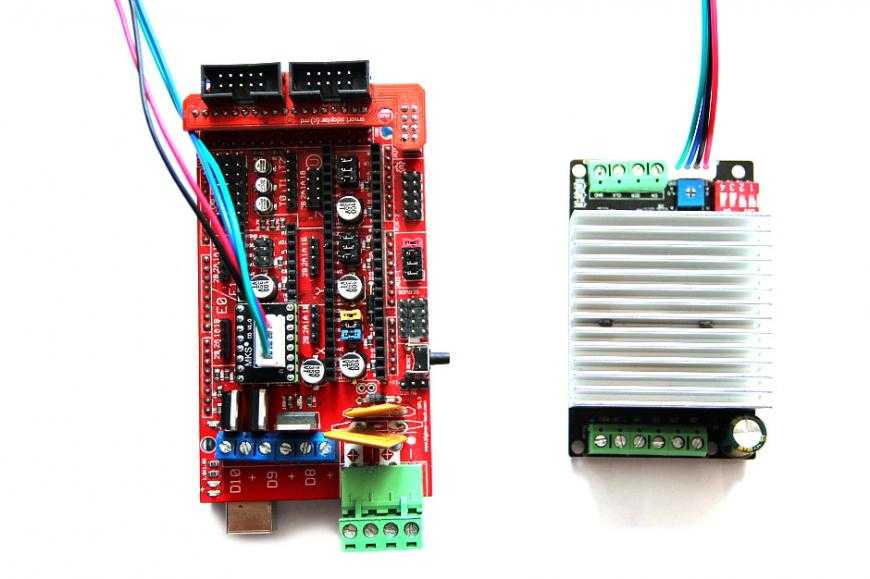
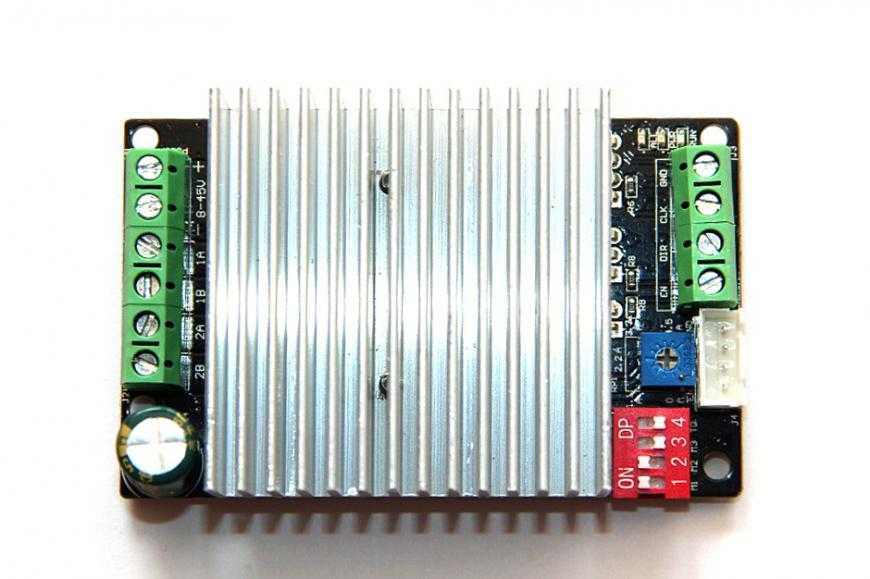
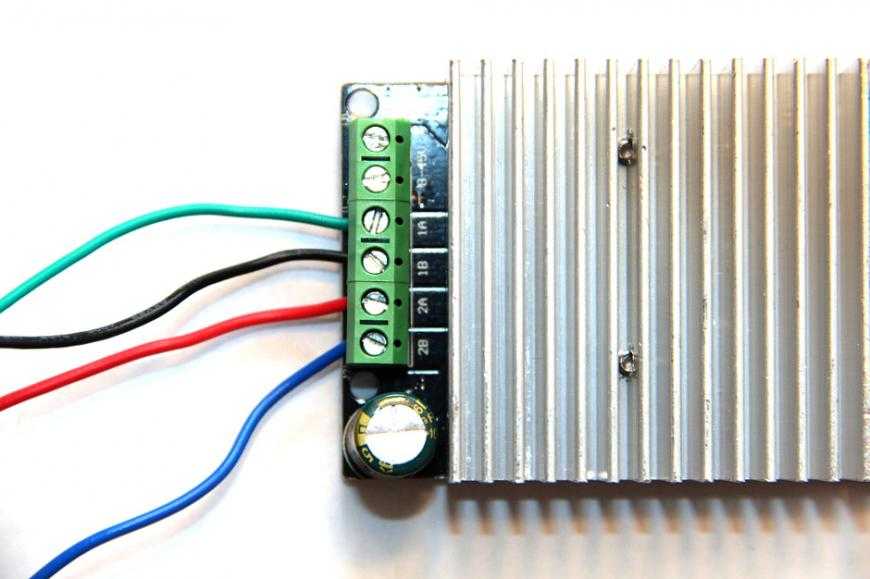
2) Подключаем драйвер шагового двигателя TB6600 к плате MKS CD 57/86 кабелем с разъемом PH-4 и PH-4.
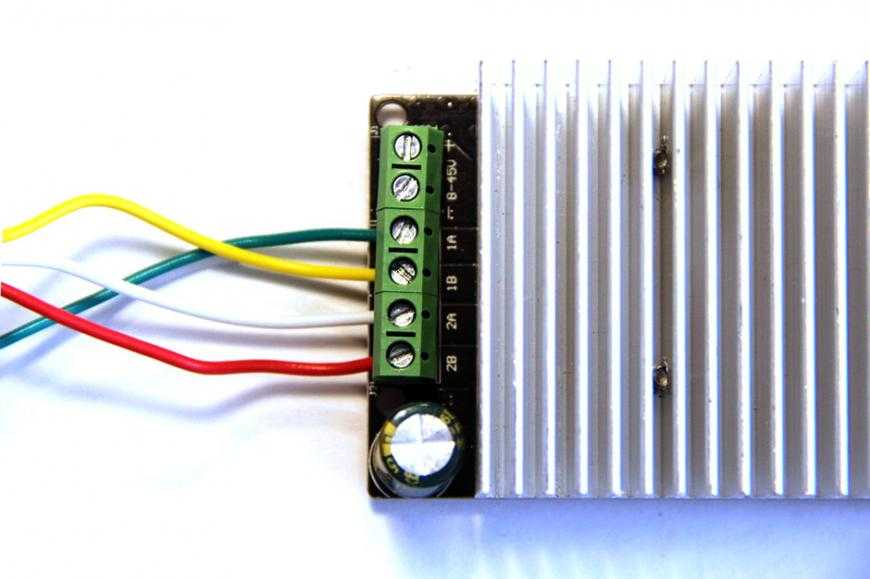
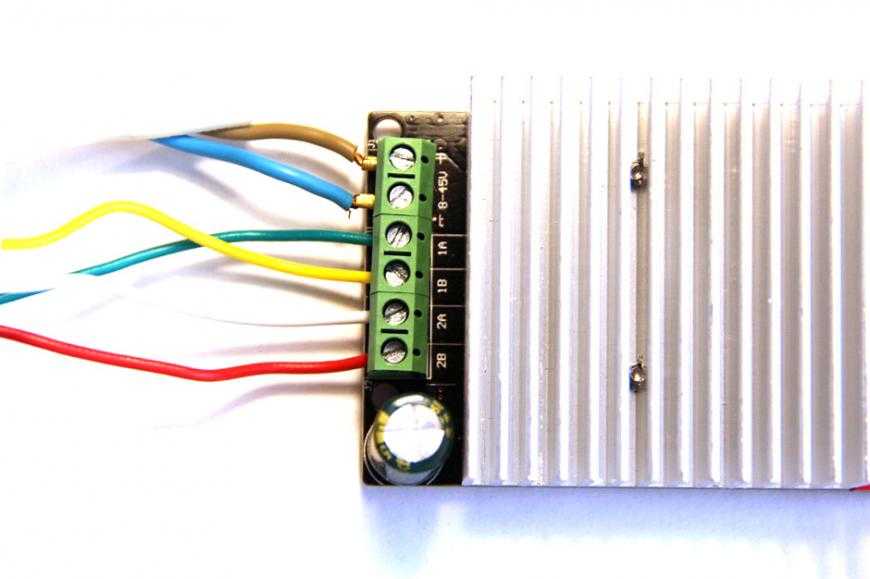
3) Подключаем шаговый двигатель NEMA 23 57HM56-2006 к драйверу ШД TB6600. Зеленый провод в разъём 1A, желтый в разъём 1B, белый в разъём 2A, красный в разъём 2B. Черный и синий провода лучше заизолировать, не ну если Вам нравится прыгать с бубном то не делайте этого.
Таким образом, подключить униполярный шаговый двигатель к ramps 1.4 не так уж и сложно, достаточно немного знать теории и быть внимательным. Надеюсь, что теперь Вам помощь бубна в этой теме не потребуется ;).
NEMA 17 Stepper Motor
A NEMA 17 stepper motor is a specific type of stepper motor that has a faceplate of 1.7 x 1.7 inches (42.3 mm × 42.3 mm) and a step angle of 1.8 degrees, which means it requires 200 steps to complete one full revolution. These motors are widely used in various applications, such as 3D printers, CNC machines, robotics, and automation systems. NEMA 17 stepper motors provide high accuracy and torque at low speeds, making them ideal for precision motion control tasks .
They are typically available in various holding torque ratings and can be wired as bipolar or unipolar depending on the specific application requirements.
Особенности шагового двигателя Nema 17
Основным преимуществом шаговых двигателей Nema 17 является их высокая точность позиционирования. Это достигается благодаря особому устройству двигателя, которое перемещает ротор через небольшие поступательные шаги. Благодаря этой особенности, шаговые двигатели могут точно управлять положением и скоростью вращения вала.
Еще одной особенностью Nema 17 является его высокая мощность и скоростная характеристика. Это позволяет использовать его в широком спектре приложений, где требуется гибкое и точное управление движением. Такие приложения включают в себя промышленные роботы, 3D-принтеры, станки с ЧПУ, медицинское оборудование и многое другое.
Двигатель Nema 17 также имеет свои спецификации, которые определяют его технические характеристики. В частности, он имеет определенное число шагов на оборот, обычно 200. Это означает, что для полного оборота вала необходимо сделать 200 шагов с помощью управляющего электронного модуля.
Еще одной важной особенностью Nema 17 является его удобство в управлении. Этот двигатель совместим с большинством ЧПУ-контроллеров и распространенных интерфейсов, таких как Arduino
Это делает его легким в использовании и интеграции в различные системы.
Универсальность и гибкость
Шаговый двигатель Nema 17 представляет собой универсальное и гибкое устройство, которое может применяться во множестве различных областей. Благодаря своим компактным размерам и высокой производительности, этот двигатель можно использовать в робототехнике, автоматизации производства, 3D-печати и других сферах, где требуется точное позиционирование и надежная работа.




Nema 17 двигатель характеризуется высокой точностью и контролируемостью, что позволяет ему выполнять сложные задачи с высокой степенью погрешности. Он способен обеспечить плавное движение и точное изменение положения в пространстве, что делает его незаменимым элементом в системах, требующих высокой степени автоматизации.
Благодаря своему широкому диапазону рабочих напряжений и мощности, Nema 17 может работать с различными источниками питания и адаптироваться под различные условия эксплуатации. Это делает его очень гибким и применимым в разных условиях и средах работы.
Высокая точность и шаговость
Шаговый двигатель Nema 17 обладает высокой точностью и шаговостью, что делает его идеальным выбором для множества приложений, особенно в области ЧПУ производства.
С точностью шага 1,8 градуса, Nema 17 обеспечивает плавное и точное перемещение, что важно для точной позиционирования и управления движением. Эта высокая точность позволяет использовать Nema 17 для различных задач, включая 3D-печать, робототехнику, автоматические системы управления и другие приложения, требующие точной синхронизации движения
Благодаря своей шаговости, Nema 17 позволяет достичь точного управления движением и получить высокую степень прецизионности. Он имеет 200 шагов на один оборот, что обеспечивает точность до микрометрового уровня
Это особенно важно при работе с мелкими деталями и выполнении сложных операций
Высокая точность и шаговость Nema 17 значительно улучшают эффективность работы механизмов и обеспечивают высокий уровень контроля над движением. Этот шаговый двигатель является надежным выбором для множества задач, где требуется высокая точность и прецизионность.
Низкое энергопотребление и экономичность
Экономичность шаговых двигателей Nema 17 является еще одним преимуществом этой модели. Благодаря низкому энергопотреблению они способны существенно снизить затраты на электроэнергию по сравнению с другими типами двигателей. Кроме того, двигатели Nema 17 обладают длительным сроком службы и не требуют регулярного обслуживания, что также способствует уменьшению эксплуатационных расходов.
Где купить шаговый двигатель
Самые простые двигатели Варианты на сайте AliExpress:
| Шаговый двигатель Nema17 42BYGH 1.7A (17HS4401-S) для 3D принтера | Набор из 5 шаговых двигателей ULN2003 28BYJ-48 с платам драйверов для Ардуино | Шаговый двигатель с модулем драйвера 5V Stepper Motor 28BYJ-48 + ULN2003 |
| Еще один вариант шагового двигателя для Arduino 28BYJ-48 5V 4 Phase DC Motor + ULN2003 Drive Test Board | Набор из трех шаговых двигателей Nema17 Stepper Motor 42BYGH 1.7A (17HS4401) для 3D приентера | AliExpress.com Product – 3D Printer Parts StepStick A4988 DRV8825 Stepper Motor Driver With Heat sink Carrier Reprap RAMPS 1.4 1.5 1.6 MKS GEN V1.4 board |