
Соответствие электродвигателя нагрузке
Если нужно определить, отвечает ли вращающий момент определённого электродвигателя требованиям нагрузки, Вы можете сравнить характеристики скорости вращения/вращающего момента электродвигателя с характеристикой скорости вращения/ вращающего момента нагрузки. Вращающий момент, создаваемый электродвигателем, должен превышать потребный для нагрузки вращающий момент, включая периоды ускорения и полной скорости вращения.
Характеристика зависимости вращающего момента от скорости вращения стандартного электродвигателя и центробежного насоса.
Если мы посмотрим на характеристику , то увидим, что при ускорении электродвигателя его пуск производится при токе, соответствующем 550% тока полной нагрузки.
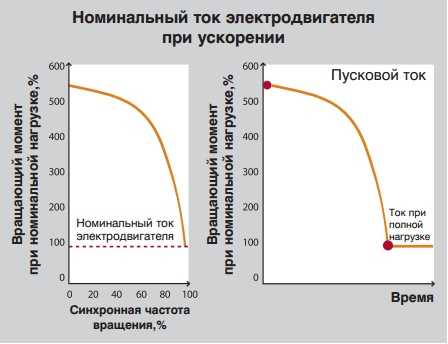
Когда двигатель приближается к своему номинальному значению скорости вращения, ток снижается. Как и следовало ожидать, во время начального периода пуска потери на электродвигателе высоки, поэтому этот период не должен быть продолжительным, чтобы не допустить перегрева.
Очень важно, чтобы максимальная скорость вращения достигалась как можно точнее. Это связано с потребляемой мощностью: например, увеличение скорости вращения на 1% по сравнению со стандартным максимумом приводит к 3%-ному увеличению потребляемой мощности
Потребляемая мощность пропорциональна диаметру рабочего колеса насоса в четвертой степени.
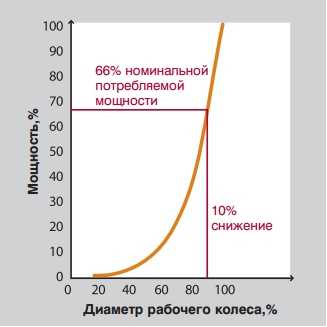
Уменьшение диаметра рабочего колеса насоса на 10% приводит к уменьшению потребляемой мощности на (1- (0.9 * 0.9 * 0.9 * 0.9)) * 100 = 34%, что равно 66% номинальной мощности. Эта зависимость определяется исключительно на практике, так как зависит от типа насоса, конструкции рабочего колеса и от того, насколько вы уменьшаете диаметр рабочего колеса.
Нагрузка насосов и типы нагрузки электродвигателя
Выделяют следующие типы нагрузок:
Постоянная мощность
Термин «постоянная мощность» используется для определённых типов нагрузки, в которых требуется меньший вращающий момент при увеличении скорости вращения, и наоборот. Нагрузки при постоянной мощности обычно применяются в металлообработке, например, сверлении, прокатке и т.п.
Постоянный вращающий момент
Как видно из названия — «постоянный вращающий момент» — подразумевается, что величина вращающего момента, необходимого для приведения в действие какого- либо механизма, постоянна, независимо от скорости вращения. Примером такого режима работы могут служить конвейеры.
Переменный вращающий момент и мощность
«Переменный вращающий момент» — эта категория представляет для нас наибольший интерес. Этот момент имеет отношение к нагрузкам, для которых требуется низкий вращающий момент при низкой частоте вращения, а при увеличении скорости вращения требуется более высокий вращающий момент. Типичным примером являются центробежные насосы.
Вся остальная часть данного раздела будет посвящена исключительно переменному вращающему моменту и мощности.
Определив, что для центробежных насосов типичным является переменный вращающий момент, мы должны проанализировать и оценить некоторые характеристики центробежного насоса. Использование приводов с переменной частотой вращения обусловлено особыми законами физики. В данном случае это законы подобия, которые описывают соотношение между разностями давления и расходами.
Во-первых, подача насоса прямо пропорциональна частоте вращения. Это означает, что если насос будет работать с частотой вращения на 25% больше, подача увеличится на 25%.
Во-вторых, напор насоса будет меняться пропорционально квадрату изменения скорости вращения. Если частота вращения увеличивается на 25%, напор возрастает на 56%.
В-третьих, что особенно интересно, мощность пропорциональна кубу изменения скорости вращения. Это означает, что если требуемая частота вращения уменьшается на 50%, это равняется 87,5%-ному уменьшению потребляемой мощности.
Итак, законы подобия объясняют, почему использование приводов с переменной частотой вращения более целесообразно в тех областях применения, где требуются переменные значения расхода и давления. Grundfos предлагает ряд электродвигателей со встроенным частотным преобразователем, который регулирует частоту вращения для достижения именно этой цели.
Так же как подача, давление и мощность, потребная величина вращающего момента зависит от скорости вращения.
На рисунке показан центробежный насос в разрезе. Требования к вращающему моменту для такого типа нагрузки почти противоположны требованиям при «постоянной мощности». Для нагрузок при переменном вращающем моменте потребный вращающий момент при низкой частоте вращения — мал, а потребный вращающий момент при высокой частоте вращения — велик. В математическом выражении вращающий момент пропорционален квадрату скорости вращения, а мощность — кубу скорости вращения.
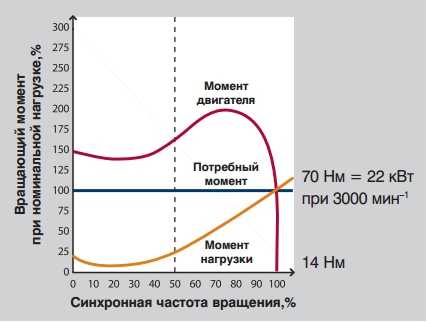
Это можно проиллюстрировать на примере характеристики вращающий момент/частота вращения, которую мы использовали ранее, когда рассказывали о вращающем моменте электродвигателя:
Когда электродвигатель набирает скорость от нуля до номинальной скорости, вращающий момент может значительно меняться. Величина вращающего момента, необходимая при определённой нагрузке, также изменяется с частотой вращения. Чтобы электродвигатель подходил для определённой нагрузки, необходимо чтобы величина вращающего момента электродвигателя всегда превышала вращающий момент, необходимый для данной нагрузки.



В примере, центробежный насос при номинальной нагрузке имеет вращающий момент, равный 70 Нм, что соответствует 22 кВт при номинальной частоте вращения 3000 мин-1. В данном случае насосу при пуске требуется 20% вращающего момента при номинальной нагрузке, т.е. приблизительно 14 Нм. После пуска вращающий момент немного падает, а затем, по мере того, как насос набирает скорость, увеличивается до величины полной нагрузки.
Очевидно, что нам необходим насос, который будет обеспечивать требуемые значения расход/напор (Q/H). Это значит, что нельзя допускать остановок электродвигателя, кроме того, электродвигатель должен постоянно ускоряться до тех пор, пока не достигнет номинальной скорости. Следовательно, необходимо, чтобы характеристика вращающего момента совпадала или превышала характеристику нагрузки на всём диапазоне от 0% до 100% скорости вращения. Любой «избыточный» момент, т.е. разница между кривой нагрузки и кривой электродвигателя, используется как ускорение вращения.
Преимущества и недостатки
К преимуществам асинхронных электродвигателей, в сравнении с другими типами электрических машин следует отнести:
- Относительно меньшая стоимость, в сравнении с другими типами электродвигателей, за счет простоты конструкции;
- Высокая степень надежности, благодаря отсутствию вспомогательных элементов редко выходят со строя;
- Способны выносить кратковременные перегрузки;
- Могут включаться в цепь напрямую без использования дополнительного оборудования;
- Низкие затраты на содержание в ходе эксплуатации.
Основными недостатками асинхронного электродвигателя являются относительно большие пусковые токи и слабый пусковой момент, что в определенной степени ограничивает сферу прямого включения. Также асинхронные электродвигатели обладают низким коэффициентом мощности и сильно зависят от параметров питающего напряжения.
Номинальный, максимальный и пусковой момент асинхронного двигателя. Формула Клосса
Трехфазный асинхронный двигатель с короткозамкнутым ротором, устройство и принцип действия.
Потери напряжения и мощности в трехфазной линии.
Ток нейтрального провода в трехфазной цепи является суммой фазных токов. При симметричной нагрузке сумма фазных токов равняется нулю. Таким образом, при симметричной нагрузке отсутствуют потери в нейтральном проводе. Потери напряжения и мощности в линии при трехфазном подключении в шесть раз меньше, чем при однофазном подключении потребителей такой же мощности.
При несимметричной нагрузке нейтральный провод необходим, по нему должен проходить выравнивающий ток. При несимметрии фазных токов появляется ток в нейтральном проводе. Если попытаться включить несимметричную нагрузку без нейтрального провода, получится перекос фаз, при котором на нагруженных фазах напряжение понизится, а на разгруженных появляется перенапряжение. Снижение напряжения нарушает работу потребителей, а перенапряжение может вывести из строя.
Потери энергии в нейтральном проводе снижают коэффициент полезного действия линии и ухудшается качество электроснабжения. Поэтому с целью получения симметричной нагрузки однофазные потребители стараются равномерно распределять по фазам.
Асинхронный электродвигатель с короткозамкнутым ротором является самым распространенным из электрических двигателей, применяемых в промышленности. Рассмотрим его устройство. На неподвижной части двигателя – статоре – размещается трехфазная обмотка, питаемая трехфазным током. Начала трех фаз этой обмотки выводятся на общий щиток, укрепленный снаружи на корпусе электродвигателя.
Собранный сердечник статора укрепляют в чугунном корпусе двигателя. Вращающуюся часть двигателя – ротор – собирают также из отдельных листов стали. В пазы ротора закладывают медные стержни, которые с двух сторон припаивают к медным кольцам.
Таким образом, все стержни оказываются замкнутыми с двух сторон накоротко. Если представить себе отдельно обмотку такого ротора, то она по внешнему виду будет напоминать «беличье колесо». В настоящее время у всех двигателей мощностью до 100 кВт «беличье колесо» делается из алюминия путем заливки его под давлением в пазы ротора. Вал вращается в подшипниках, закрепленных в подшипниковых щитах. Щиты при помощи болтов крепятся к корпусу двигателя. На один конец вала ротора насаживается шкив для передачи вращения рабочим машинам или станкам.
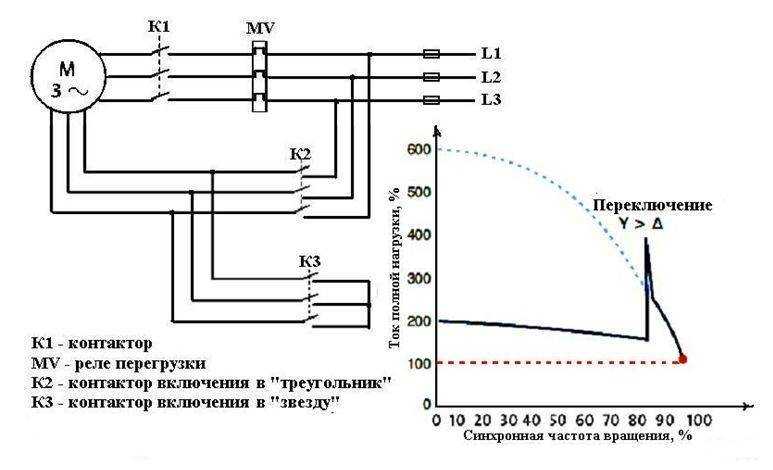
Пути ограничения пускового тока
Самый простой способ убрать лишний пусковой ток заключается в запуске оборудования на пониженном напряжении электродвигателя. Для этого конструкция предусматривает переключение обмотки с «треугольника» на «звезду» непосредственно в момент запуска. Когда же двигатель наберет некоторые обороты, обмотка переключается обратно на «треугольник». Всего несколько секунд требуется для погашения ненужного всплеска и переключения. В устройствах это реализуется за счет реле времени или иных приспособлений.
Если используется это решение, то пусковой момент также понижается. И здесь можно наблюдать квадратичную зависимость: когда напряжение уменьшится в 1,7 раза, то и момент снизится в 3 раза. Именно поэтому пуск на пониженном напряжении можно использовать лишь оборудования, в котором пуск возможен только с минимальной нагрузкой на валу двигателя асинхронного типа. Ярким примером может служить пуск многопильного станка.
Если же речь идет о мощных нагрузках, к примеру, присущих ленточному конвейеру, то указанный выше способ ограничения пускового тока не подходит. Лучше применять реостатный метод. Он дает возможность уменьшить пусковой ток без ущерба для крутящего момента. Именно этот способ можно назвать наиболее подходящим для асинхронных электродвигателей, снабженных фазным ротором. Тут удобно включается реостат в цепь обмотки ротора, а регулировка рабочего тока производится ступенчато, обеспечивая плавный пуск. А за счет реостата можно отрегулировать и рабочую скорость в двигателе, причем это характерно не только для момента запуска.
Самым же эффективным методом для безопасного запуска электродвигателей асинхронного типа можно смело назвать пуск через частотный преобразователь. Показатели напряжения и частоты здесь регулируются самим преобразователем в автоматическом режиме, за счет чего двигатель работает в оптимальных для себя условиях. Так удается достичь стабильности в оборотах, но полностью исключить броски тока.
Источник
Какую роль играет пусковой момент

Встречаются ситуации, когда двигатели подключают непосредственно к сети, а коммутацию производят за счет обычного магнитного пускателя. Для этого линейное напряжение подается на обмотки, образуется вращающееся магнитное поле статора, за счет чего оборудование начинает работать.
В этом случае не избежать броска тока, который по своей величине превысит номинальный ток в 5-7 раз. И чем мощнее двигатель и выше нагрузка, тем большей будет и длительность такого превышения. Более мощные моторы демонстрируют продолжительный старт, а обмотки статора в них принимают токовую перегрузку дольше.
Двигатели малой мощности, не превышающей 3 кВт, могут с легкостью перенести такие перепады. Сеть тоже вполне достойно справляется с кратковременными бросками мощности, поскольку у сети в любом случае присутствует некий мощностной резерв. Это объясняет, почему мелкие бытовые электроприборы, а также небольшие станки, вентиляторы и насосы подсоединяют напрямую, не беспокоясь о том, что они подвергаются перегрузкам. Обмотки статоров в двигателях маломощного оборудования соединяются «звездой», если расчет идет на 3-фазное напряжение в 380 вольт или «треугольником», когда речь идет о 220 вольтах.
Но если двигатель более мощный, с показателем в 10 и больше кВт, то его недопустимо включать в сеть напрямую. Нужно ограничить бросок тока, иначе можно спровоцировать существенную перегрузку, которая приведет к опасным последствиям.
Как узнать пусковой ток?
Кратность пускового тока (отношение пускового тока к номинальному) найти в документации на двигатель бывает не так-то просто. Но его можно измерить (оценить, узнать) самому. Вот навскидку несколько способов:
- Первый способ (лучший) – использовать осциллограф. Взять шунт (например, резистор 0,1…0,5 Ом, чем меньше по сравнению с обмотками, тем лучше), и посмотреть на нём осциллограмму в момент пуска. Далее из максимального амплитудного значения определяем действующее напряжение (поделить на корень из 2), далее по закону Ома считаем пусковой ток. Можно ничего не умножать и не делить – просто измерить клещами ток в рабочем режиме, и умножить его на разницу токов на экране осциллографа. Способ хорош тем, что видно переходные процессы, вызванные ЭДС самоиндукции, мгновенные значения тока, длительность разгона. Кроме того, учитываются параметры питающей сети. Ещё плюс – пусковой ток измеряется реальный, на реальном двигателе и механизме.
- Второй способ измерения пускового тока – подать на двигатель пониженное (в 5-10 раз) напряжение рабочей частоты и измерить ток. Почему пониженное? Это необходимо для того, чтобы ротор можно было легко зафиксировать, не допуская перегрева. Измеренный ток пересчитать, получим пусковой. Достаточно измерить ток на одной фазе. По другим токи будут (обязаны быть) такими же. Этот способ используют при производстве и испытаниях двигателей. Именно этим способом производители получают табличные данные. Способ опирается на номинальный ток, в реальности (на реальном механизме) пусковой ток может быть другим!
- Измерить пусковой ток токоизмерительными клещами. Плюс этого способа – простота и оперативность. Клещи используют в большинстве случаев для проверки режимов работы двигателей. Минус – такие клещи достаточно инерционны, а нам нужно увидеть, что происходит за доли секунды. Но этот минус нивелируется, когда мы измеряем ток при пуске нагрузки с высоким моментом инерции (вентиляторы, насосы с массивными крыльчатками). Пуск длится более 10 сек, и на экране клещей всё видно.
- Трансформатор тока. Такой используется, например, в узлах учета электроэнергии – благодаря трансформатору тока нет необходимости измерять реальной ток, а можно измерить ток, уменьшенный в точно известное количество раз. Так же измеряют ток в электронных пусковых устройствах (преобразователях частоты, софтстартерах). Минус способа – трансформатор тока рассчитан на частоту 50/60 Гц, а переходные процессы во время пуска имеют широкий спектр и много гармоник. Поэтому можно сказать, что такой способ тоже обладает высокой инерционностью.
Конечно, реальность отличается от эксперимента. Прежде всего тем, что ток короткого замыкания реальной сети питания не бесконечен. То есть, провода, питающие двигатель, имеют сопротивление, на котором в момент пуска падает напряжение (иногда – до 50%). Из-за этого ограничения реальный пусковой ток будет меньше, а разгон – длительнее. Поэтому нужно понимать, что значение кратности пускового тока, указанное производителем, в реальности всегда будет меньше.

Для чего нужны двигатели – приводить в действие механизмы и получать прибыль!
Теперь разберём другой вопрос –
Пусковые свойства двигателя
⇐ ПредыдущаяСтр 10 из 15Следующая ⇒
Пусковые свойства асинхронного двигателя оцениваются его пусковыми характеристиками:
а) величиной пускового тока Iп или его кратностью Iп/ I1н;
б) величиной пускового момента Мп или его кратностью Мп/Мн;
в) продолжительностью и плавностью пуска двигателя в ход;
г) сложностью пусковой операции;
д) экономичностью пусковой операции (стоимость и надежность пусковой аппаратуры).
В начальный момент пуска скольжение s = 1, поэтому, пренебрегая током холостого хода, величина пускового тока Iп будет равна
Iп = U1 / (√ ).
Следовательно, улучшить пусковые свойства двигателя можно путем увеличения активного сопротивления цепи ротора r’2, так как в этом случае уменьшается пусковой ток и увеличивается пусковой момент. В то же время напряжение U1 по-разному влияет на пусковые характеристики: с уменьшением U1 пусковой ток уменьшается, что благоприятно влияет на пусковые свойства двигателя, но одновременно это вызывает уменьшение пускового момента. Возможность применения того или иного способа улучшения пусковых характеристик определяется условиями эксплуатации двигателя и требованиями, которые к нему предъявляются.


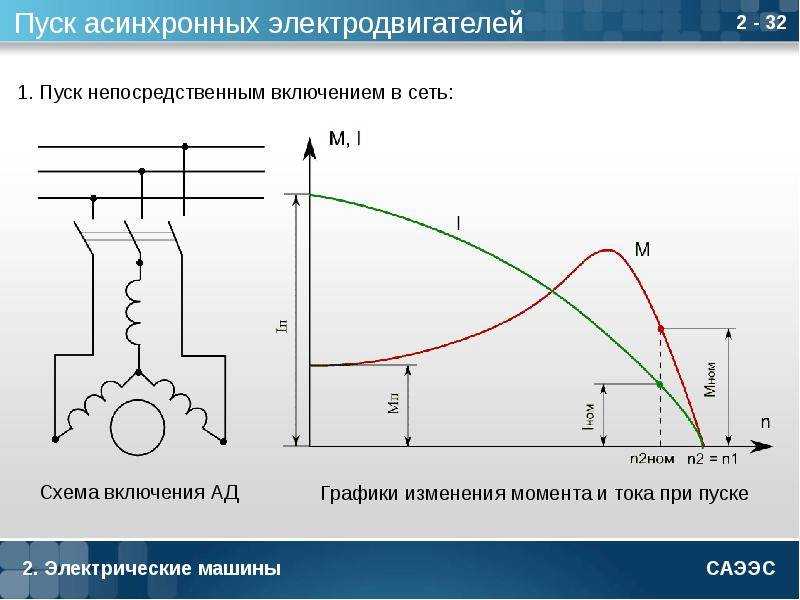
Практически используются следующие способы пуска: непосредственное подключение обмотки статора к сети (прямой пуск); понижение напряжения, подводимого к двигателю при пуске; подключение к обмотке ротора пускового реостата.
Прямой пуск применяется для двигателей малой и средней мощности. Обычно при прямом пуске действующее значение пускового тока превосходит номинальное значение в четыре — шесть раз.
Прямой пуск самый распространенный способ пуска в ход асинхронных двигателей. Недостатками его являются: большой пусковой ток и сравнительно малый пусковой момент, достоинство — простота.
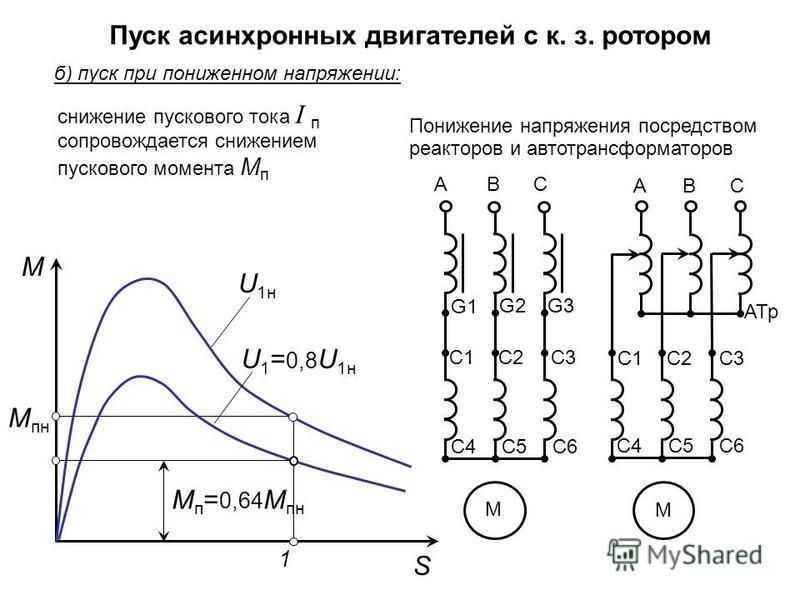
Пуск асинхронного двигателя при пониженном напряжении применяют для двигателей большой мощности. Понижение напряжения может осуществляться тремя способами:
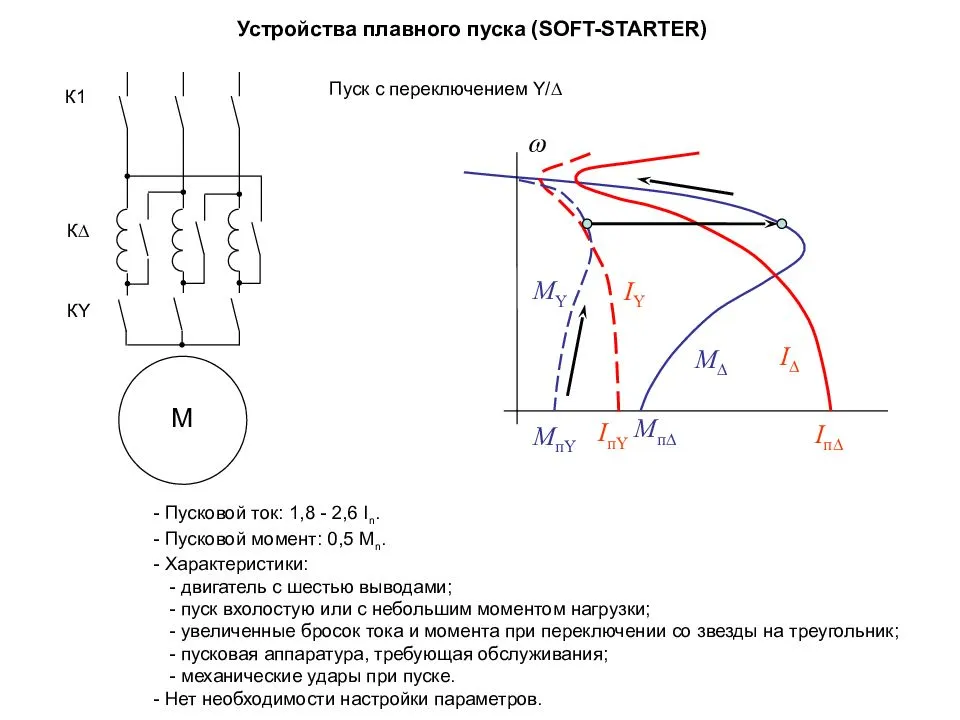
а) путем переключения обмотки статора при пуске с нормальной схемы «треугольник» на пусковую схему «звезда». В этом случае фазовое напряжение уменьшается в раз, что обуславливает уменьшение фазовых токов в раз и линейных токов в 3 раза. По окончании процесса пуска обмотку статора переключают на нормальную схему «треугольник».
Недостаток этого способа пуска состоит в том, что уменьшение напряжения в Ù1/U1н раз сопровождается уменьшением начального пускового момента Мп двигателя в (Ù1/U1н)2 раз. Необходимое сопротивление реактора определяется по формуле:
где U1н – номинальное (фазное) напряжение статорной обмотки;
Kp = I’п /Iп – отношение пускового тока статора при пуске к пусковому току двигателя при пуске непосредственным включением в сеть; обычно Kp = 0,65.
б) путем включения в цепь статора на период пуска добавочных активных или реактивных сопротивлений.
в) путем подключения двигателя к сети через понижающий автотрансформатор. Секции трансформатора в процессе пуска переключаются соответствующей аппаратурой.
Автотрансформаторный способ пуска, как и другие способы пуска асинхронных двигателей, основанные на уменьшении подводимого напряжения, сопровождается уменьшением пускового момента, так как величина последнего прямо пропорциональна квадрату напряжения. С точки зрения пусковых токов и пусковых моментов, автотрансформаторный способ пуска выгоднее реакторного, так как при одинаковом уменьшении напряжения пусковой ток при реакторном способе пуска уменьшается в U’1 / U1н раз, а при автотрансформаторном способе пуска – в (U’1 / U1н)2 раз. Но сложность пусковой операции и высокая стоимость аппаратуры несколько ограничивают применение автотрансформаторного способа пуска асинхронных двигателей.
Недостатком всех этих способов является значительное уменьшение пускового момента, который пропорционален квадрату приложенного напряжения. Поэтому пуск асинхронного двигателя при пониженном напряжении может применяться только при пуске двигателей без нагрузки.
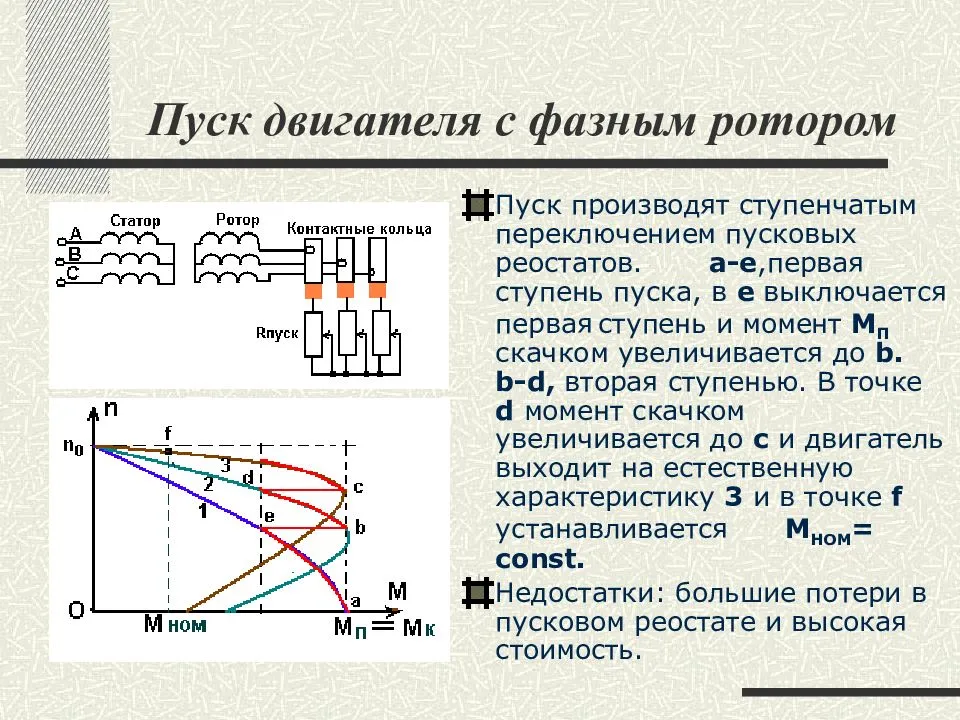
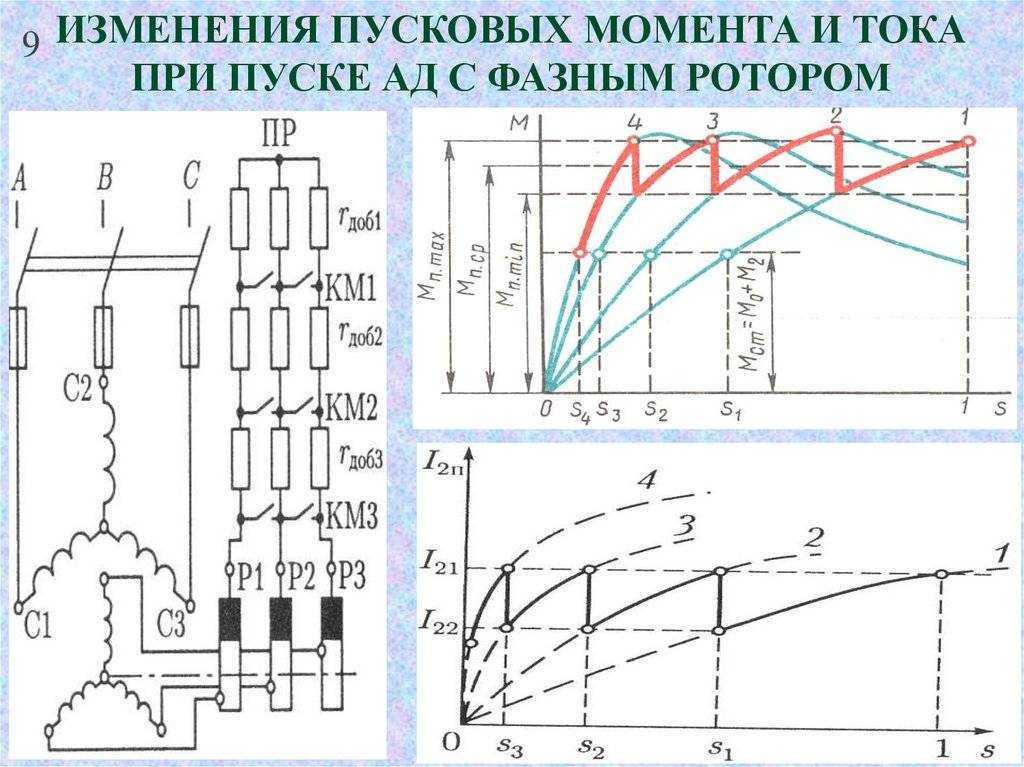
Пуск с помощью пускового реостата применяется для двигателей с фазовым ротором. Этим способом можно осуществить пуск двигателя при и резко уменьшить пусковой ток. Двигатели с фазовым ротором применяют только при тяжелых условиях пуска (когда необходимо развивать максимально возможный пусковой момент), при малой мощности электрической сети или при необходимости плавного регулирования скорости вращения.
Пусковые свойства двигателя
Пусковые свойства асинхронного двигателя оцениваются его пусковыми характеристиками:
а) величиной пускового тока Iп или его кратностью Iп/ I1н;
б) величиной пускового момента Мп или его кратностью Мп/Мн;
в) продолжительностью и плавностью пуска двигателя в ход;
г) сложностью пусковой операции;
д) экономичностью пусковой операции (стоимость и надежность пусковой аппаратуры).
В начальный момент пуска скольжение s = 1, поэтому, пренебрегая током холостого хода, величина пускового тока Iп будет равна
Iп = U1 / (√ ).
Следовательно, улучшить пусковые свойства двигателя можно путем увеличения активного сопротивления цепи ротора r’2, так как в этом случае уменьшается пусковой ток и увеличивается пусковой момент. В то же время напряжение U1 по-разному влияет на пусковые характеристики: с уменьшением U1 пусковой ток уменьшается, что благоприятно влияет на пусковые свойства двигателя, но одновременно это вызывает уменьшение пускового момента. Возможность применения того или иного способа улучшения пусковых характеристик определяется условиями эксплуатации двигателя и требованиями, которые к нему предъявляются.
Практически используются следующие способы пуска: непосредственное подключение обмотки статора к сети (прямой пуск); понижение напряжения, подводимого к двигателю при пуске; подключение к обмотке ротора пускового реостата.
Прямой пуск применяется для двигателей малой и средней мощности. Обычно при прямом пуске действующее значение пускового тока превосходит номинальное значение в четыре — шесть раз.
Прямой пуск самый распространенный способ пуска в ход асинхронных двигателей. Недостатками его являются: большой пусковой ток и сравнительно малый пусковой момент, достоинство — простота.
Пуск асинхронного двигателя при пониженном напряжении применяют для двигателей большой мощности. Понижение напряжения может осуществляться тремя способами:
а) путем переключения обмотки статора при пуске с нормальной схемы «треугольник» на пусковую схему «звезда». В этом случае фазовое напряжение уменьшается в
раз, что обуславливает уменьшение фазовых токов в раз и линейных токов в 3 раза. По окончании процесса пуска обмотку статора переключают на нормальную схему «треугольник».
Где лучше выполнять переоборудование
Объявления об увеличении мощности машины часто можно встретить на билбордах, в газетах, на сайтах автосервисов. Многие небольшие мастерские предлагают изменить двигатель, но достаточно часто встречается ситуация, когда они не располагают нужным инструментом либо квалификацией. Опытные мастера редко будут работать в маленьких мастерских, которые имеют минимум оборудования.
Бывает, что мощности электродвигателя недостаточно для обеспечения запуска и работы какого-либо устройства. Как увеличить мощность электродвигателя? Прежде всего, следует знать причину: почему не хватает мощности — а она кроется в параметрах тока, протекающего по обмоткам агрегата. Следовательно, нужно увеличить его значение, либо включив двигатель в сеть большей частоты (если это устройство переменного тока), либо внеся некоторые конструктивные изменения (при включении в бытовую сеть). Ниже мы рассмотрим последний случай.
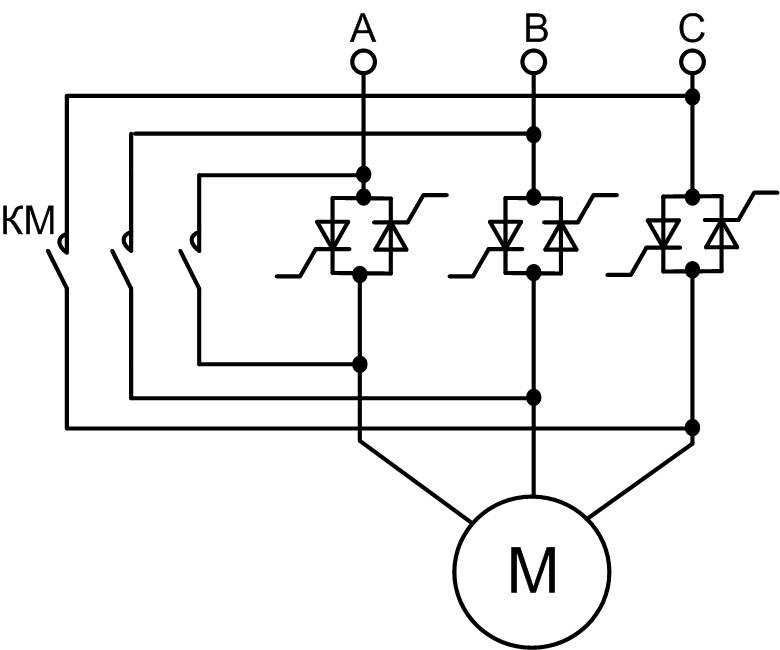
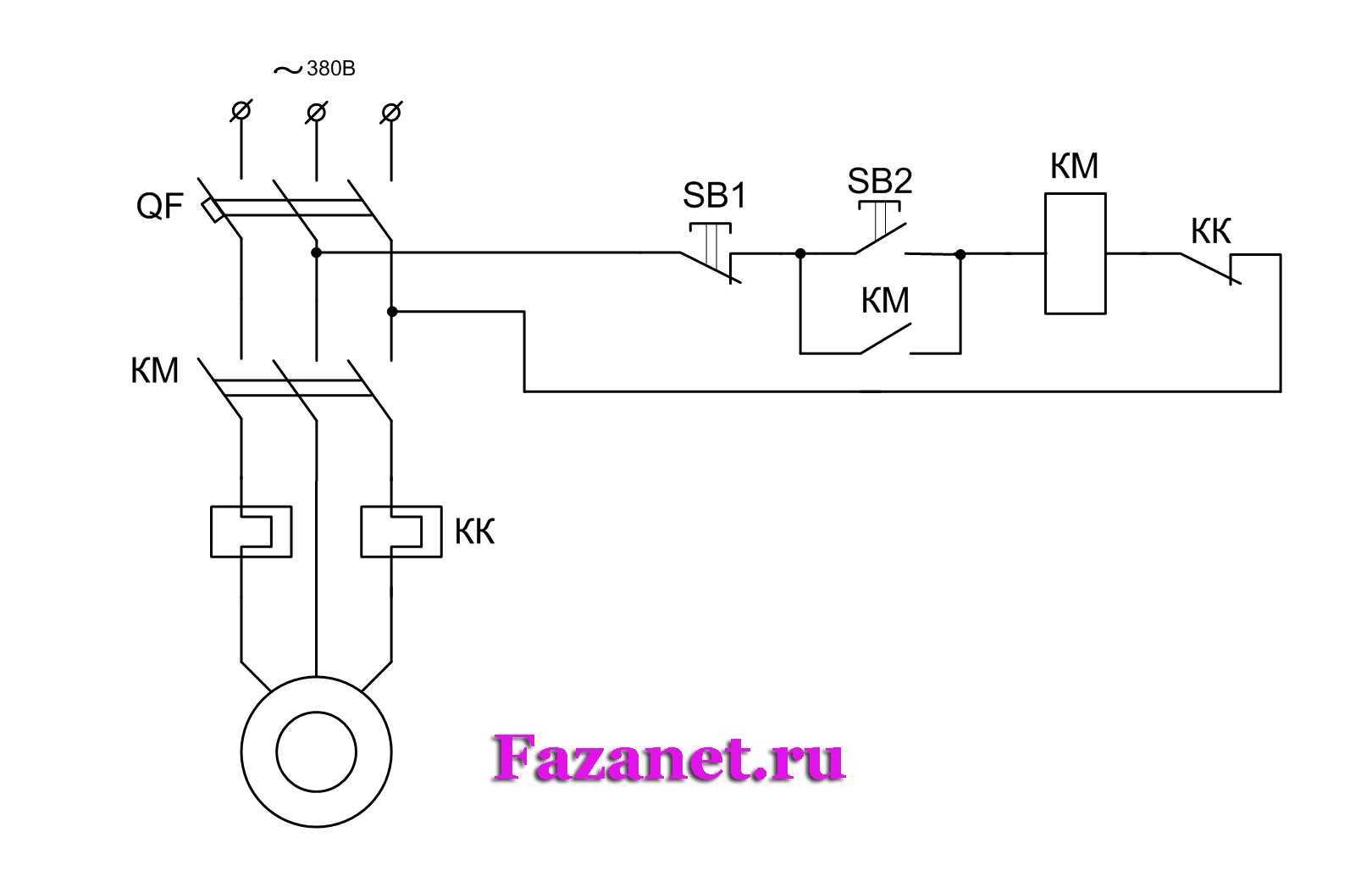
Схемы включения асинхронного двигателя
Для уменьшения воздействия пусковых токов применяются различные схемы включения. Это зависит от механизма и мощности электродвигателя.
Типовое включение двигателя осуществляется напрямую. Напряжение на обмотки подается через магнитный пускатель.
Во время пуска в сети возникает бросок тока, который превышает номинальный в 5-7 раз. Длительность зависит от мощности электродвигателя и нагрузки на валу. Чем мощнее устройство, тем длительнее период разгона.


В результате возникает понижение напряжения в сети, что отрицательно сказывается на аппаратуре, подключенной к этой цепи. Маломощные не оказывают существенного влияния на сети.
На графике снизу представлена зависимость тока от времени разгона электродвигателя:
При запуске мощного электропривода 10 и более кВт следует ограничивать пусковой ток. Это необходимо, чтобы сети не испытывали значительные перегрузки, в результате, которой происходит понижение напряжения сети, что приводит к нештатной ситуации.
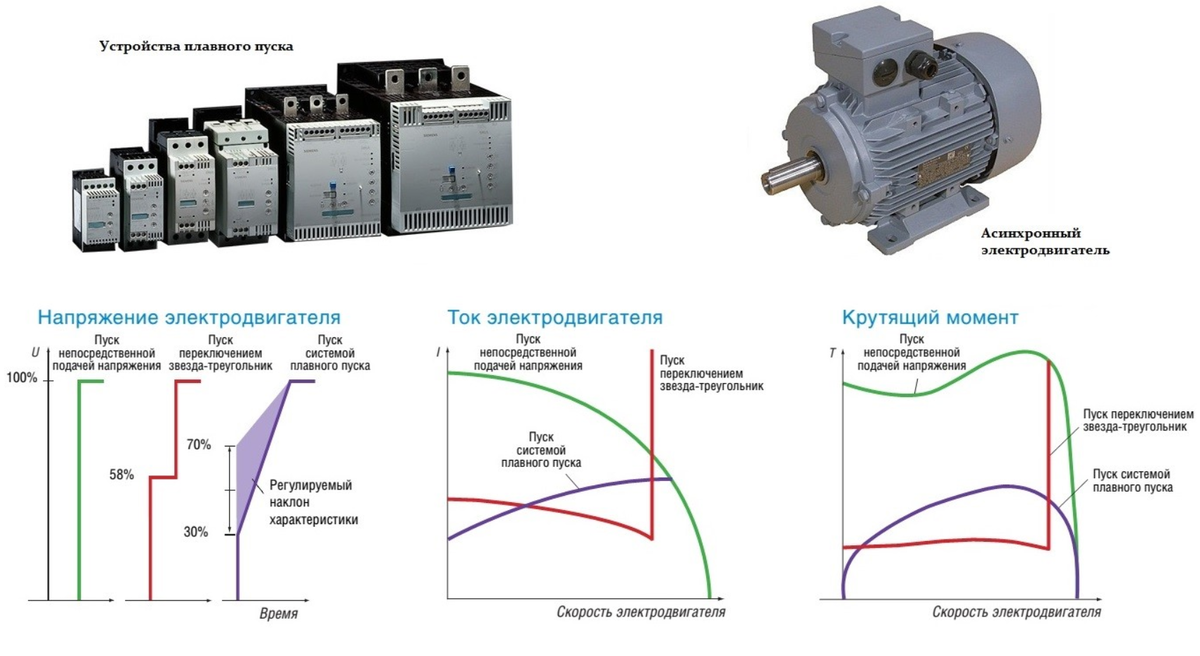
Для этого применяются схемы переключения с треугольника на звезду, используются токоограничивающие устройства или частотные преобразователи.
Способы снижения пусковых токов АД
Уменьшить пусковые токи асинхронного двигателя можно несколькими способами. Перечислим их по порядку.
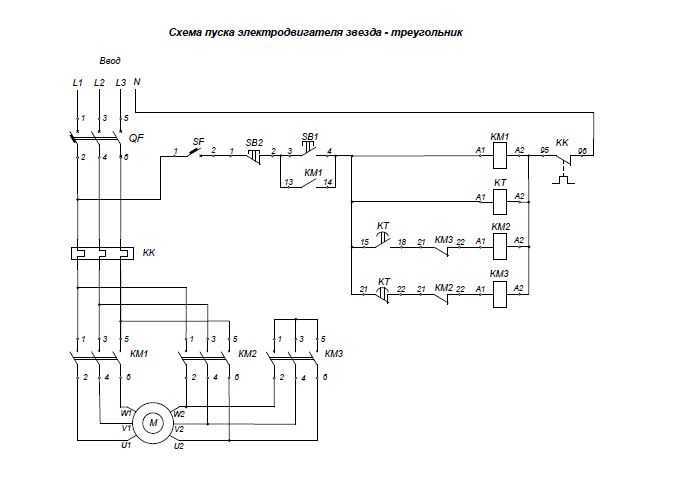
Наиболее распространенным методом, является запуск двигателя при пониженном напряжении. Для чего коммутируют обмотки асинхронного двигателя. В начальный момент пуска, обмотки переключают с треугольника на звезду. После набора оборотов коммутацию возвращают в первоначальное положение. При этом следует учитывать, что пусковой момент при таком запуске уменьшается. Например, при снижении напряжения в 1,72 (корень квадратный из 3) раза, момент уменьшится в три раза. Такой метод применяется при запуске механизмов с минимальной нагрузкой на валу, где установлены асинхронные электродвигатели с короткозамкнутым ротором.
Так же ограничение токов во время запуска двигателя осуществляют включением последовательно с обмотками статора индукционных сопротивлений. В некоторых случаях для этих целей используются резисторы. После выхода двигателя на оптимальные режимы, резисторы шунтируются.
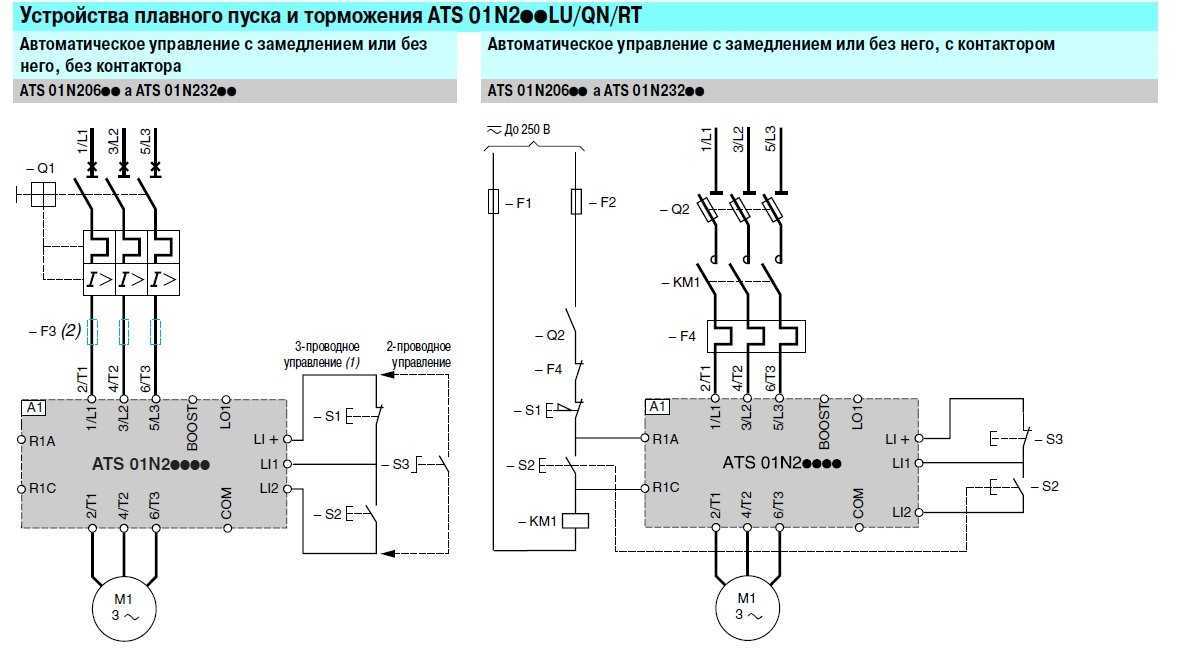
На рисунке снизу показаны варианты запуска при пониженном напряжении:
Пуск при пониженном напряжении
При уменьшении нагрузки на валу можно регулировать пусковые токи. В первоначальный промежуток времени подключается часть нагрузки. После достижения оптимальных оборотов, подается полная нагрузка.
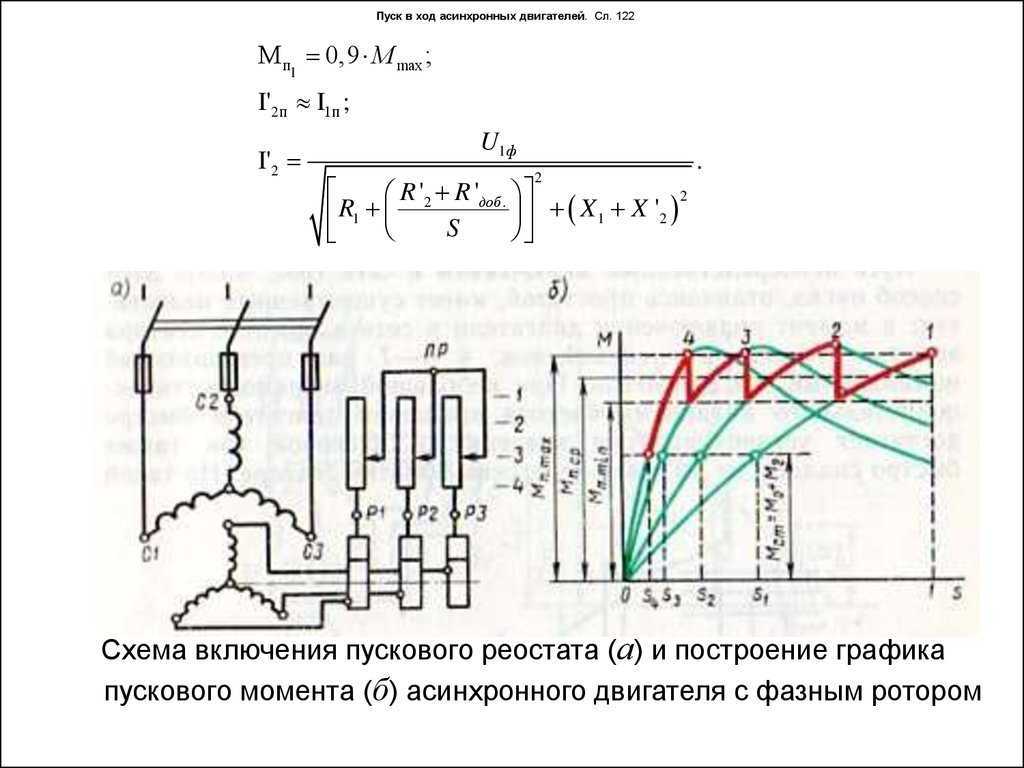
Для мощных устройств применяют реостатный запуск. Такой пуск используют для приводов укомплектованных асинхронными электродвигателями с фазным ротором. Регулировка производится ступенчато, т.е. резисторы отключаются постепенно с набором скорости вращения. Таким образом обеспечивается плавный пуск.
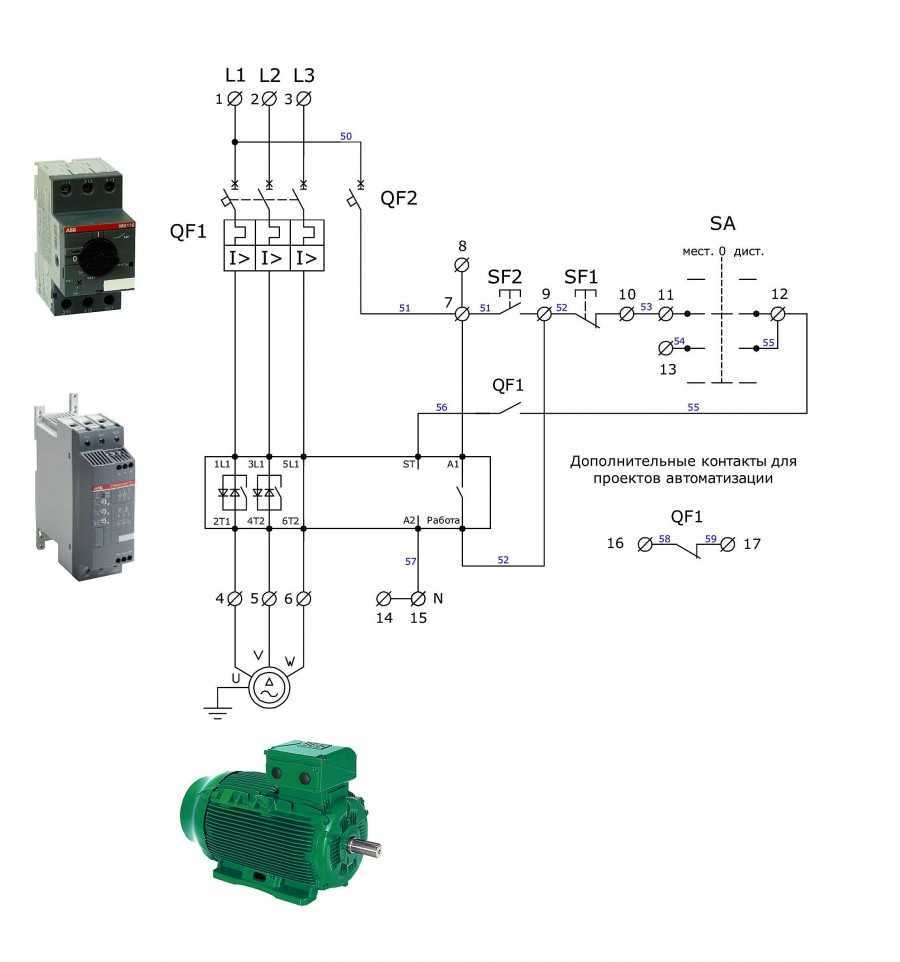
На рисунке снизу представлена принципиальная схема запуска:
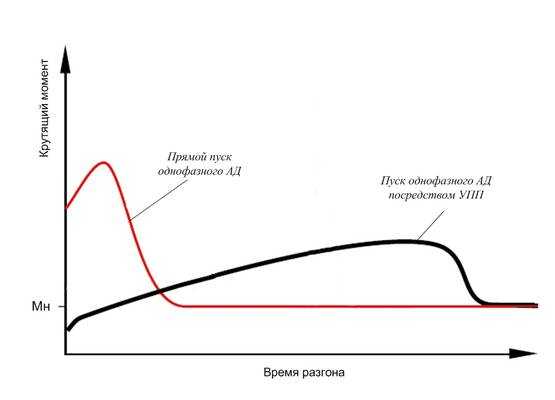
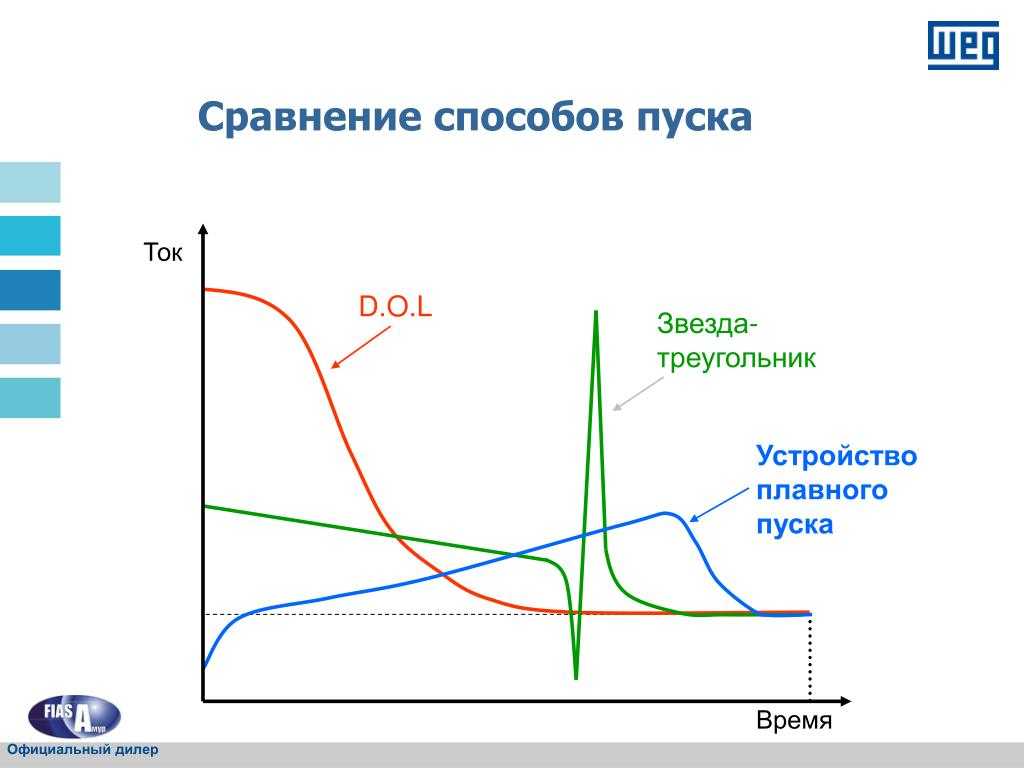
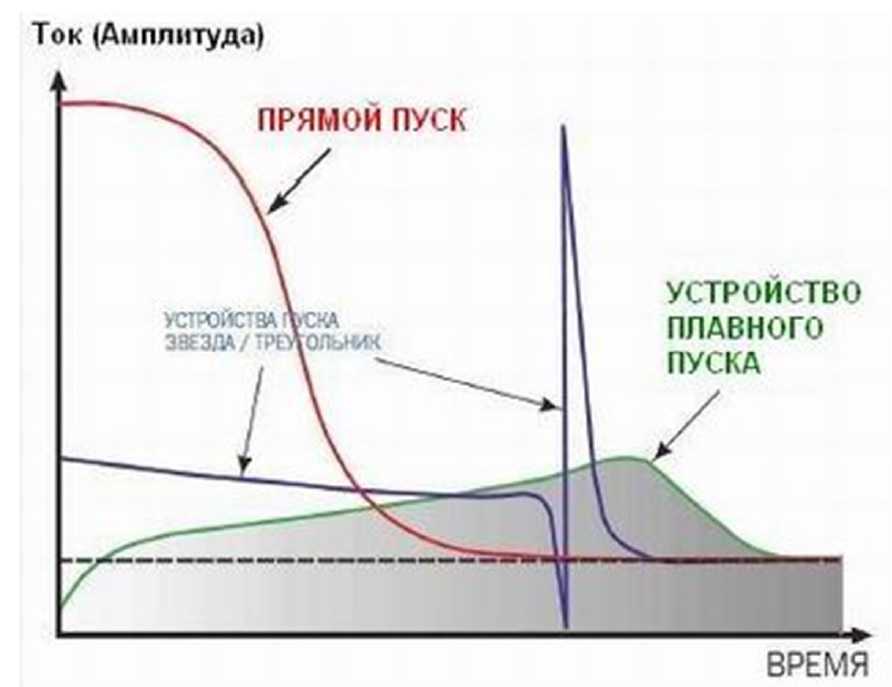
График токов при прямом и плавном пуске электропривода:
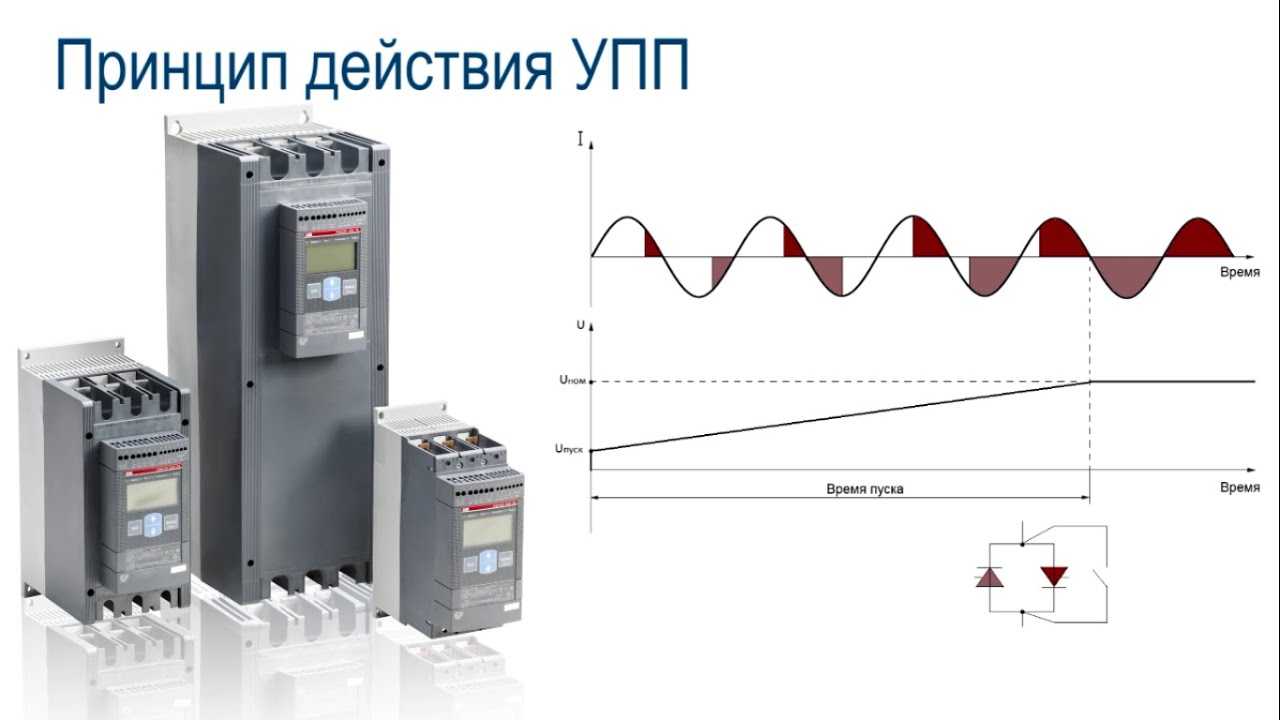
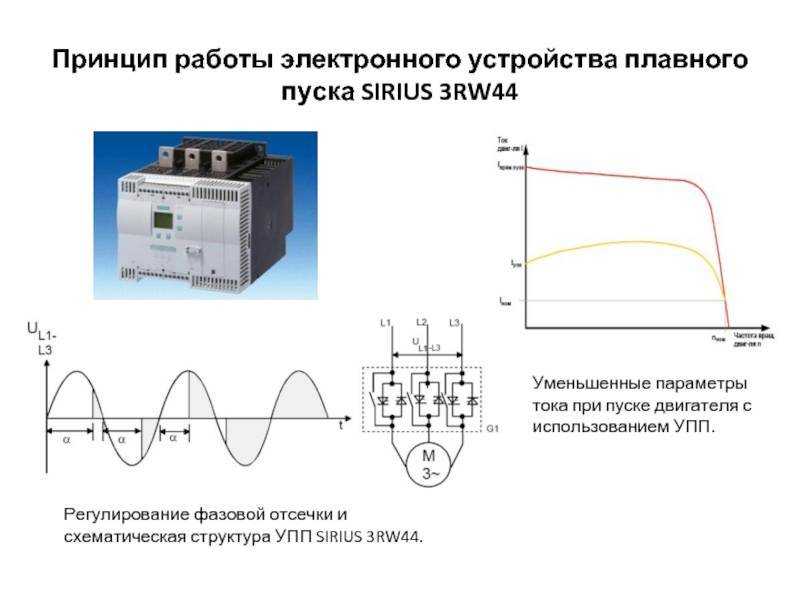
Наиболее щадящий запуск механизмов обеспечивает пуск с помощью частотного преобразователя. В этом случае частотный преобразователь самостоятельно выбирает оптимальные режимы. При этом можно увеличить пусковой момент, не повышая нагрузку на сети. Использование частотного преобразователя полностью исключаются нежелательные броски тока в сети.
Источник